Range Rover Sport / L494 2017 ELECTRICAL INSTRUMENT AND WARNING SYSTEMS
413-01: Instrument Cluster
2017.0 RANGE ROVER SPORT (LW), 413-01
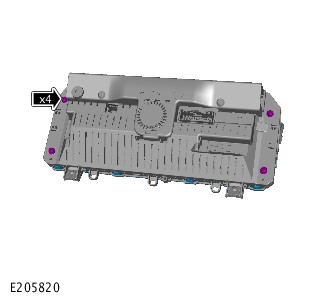
INSTRUMENT CLUSTER (G1950147)
| DESCRIPTION | NM | IB-IN |
|---|---|---|
| Instrument cluster surrounding trim screws | 1.7 | 15 |
| Instrument cluster upper screws | 1.1 | 9.7 |
| Instrument cluster lower screws | 1.7 | 15 |
Description and Operation
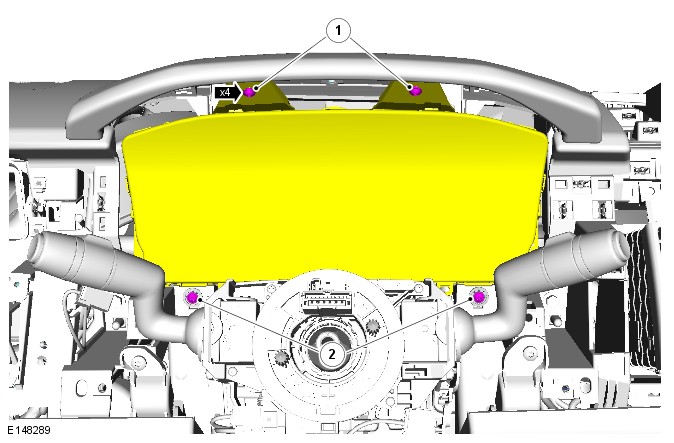
INSTRUMENT CLUSTER (G1950056)
INSTRUMENT CLUSTER
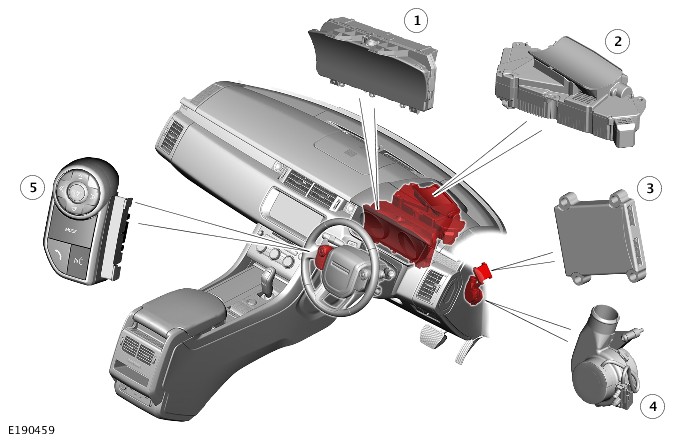
| ITEM | DESCRIPTION |
|---|---|
| 1 | Instrument Cluster (IC) |
| 2 | Head Up Display (HUD) |
| 3 | Head Up Display Cooling Fan Control Module (HUDCFCM) |
| 4 | Head Up Display cooling fan |
| 5 | Steering wheel switchpack - left |
INSTRUMENT CLUSTER
The Instrument Cluster (IC) is a high definition Thin Film Transistor (TFT) display.
The display is continually reconfigured to prioritize and refine the information presented to the driver. Two hardwired warning indicators are in the cluster; the security warning indicator and a primary airbag/Supplemental Restraint System (SRS) warning indicator. These warning indicators are Light Emitting Diodes (LED). All other warning indicators are generated within the IC TFT screen.
The speedometer is located on the left side of the instrument cluster and is available in the following market variants:
- Major scale miles per hour (mph) United Kingdom (UK) and United States (US) Diesel and Petrol.
- Major scale kilometres per hour (km/h) Rest of World (ROW) Diesel and Petrol.
The Tachometer is located on the right side of the IC.
The IC features a number of warning indicators. The warning indicators illuminate in one of four colors which indicate the level of importance of the warning as follows:
- Red = Warning.
- Amber = Caution.
- Green = System operative.
- Blue = Headlamp high beam operative.
A feature and driver preference menu is available to allow the driver to select certain features and functions of the IC and change them to their personal preference. A menu control 'joy pad' is located on the left steering wheel switchpack and allows selection of the displayed functions and navigation of the menus. When selected, the menu is displayed in the Information and Message Center.
HEAD UP DISPLAY
The Head Up Display (HUD) is a transparent display that presents data without the driver requiring to look away from their viewpoint.
A virtual image is displayed on the windscreen which appears at a distance of approximately two meters, giving the impression that the image appears around the end of the bonnet.
This function is designed to provide an increase in safety and convenience by maximising eyes on the road time.
The HUD is designed to work with a specially designed windscreen, which is formed to prevent double images and achieve the best display performance.
When selected the HUD feature projects the following driver information display onto the inside of the windscreen:
- Vehicle speed.
- Traffic Sign Recognition (TSR) and Identified speed limits.
- Gear selection.
- Navigation instructions.
- Cruise control/Automatic Speed Limiter (ASL) active symbol.
- Cruise control/Automatic Speed Limiter (ASL) set speed symbol.
- Follow mode active symbol.
START UP
When the vehicle is locked most of the display goes off. Some vehicle status items remain until the vehicle systems shut down. When the vehicle is unlocked the display slowly illuminates to show the background image and display vehicle starting information to the driver.
Pressing the stop/start button will initiate a full build of the screen display to display the speedometer and tachometer and also the warning indicators. When the engine is running a range of applicable instruments, messages and warning indicators are displayed.
INSTRUMENT CLUSTER DISPLAY THEMES
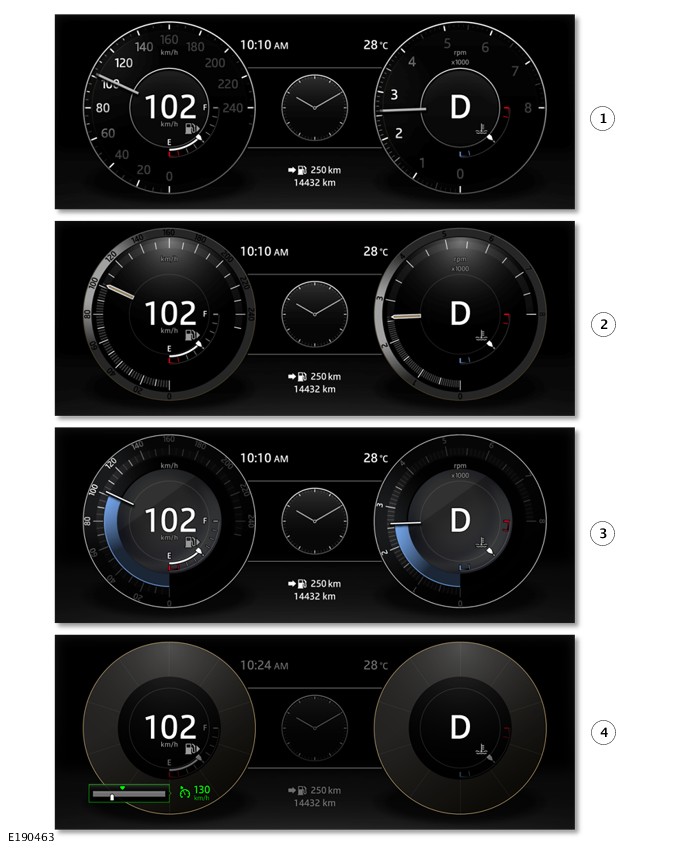
| ITEM | DESCRIPTION |
|---|---|
| 1 | Chronometer (Default) |
| 2 | Precision Theme |
| 3 | Graphic Theme |
| 4 | Minimal Theme |
There are four different themes the driver may choose to display information on the Instrument Cluster (IC).
EVENT SCREENS

| ITEM | DESCRIPTION |
|---|---|
| 1 | Sport (Tachometer scale recalibrates) |
| 2 | Sport Dynamic (Tachometer scale recalibrates) |
| 3 | Off road |
| 4 | Off road, Low range (Speedometer and Tachometer scales recalibrate) |
A large number of differing permutations of screens are available to cover all possible combinations of the available functions. The illustration shows a few of the options available, but other screens are available to cover a range of vehicle functions.
Certain vehicle functions will overwrite the existing information displayed.
A number of features are also used to convey information to the driver. For example, if speed control is selected, the set speed is displayed as a marker in the speedometer outer ring.
The speedometer is driven by square wave signals derived from the wheel speed sensors and the Anti-lock Brake System (ABS) control module. The signal is received on the High Speed (HS) Controller Area Network (CAN) chassis bus. The fuel gauge is shown in the speedometer gauge.
The tachometer is driven by an engine speed signal transmitted to the Instrument Cluster (IC) on HS CAN Comfort bus (via the Gateway Module) from the Crankshaft Position (CKP) sensor. The engine coolant temperature gauge is shown in the tachometer gauge.
INSTRUMENT CLUSTER MENU
The Instrument Cluster (IC) menu is only visible when all current messages have been cleared and the MENU/OK switch is pressed. Menu selections are made using the MENU/OK switch to select the required menu option.
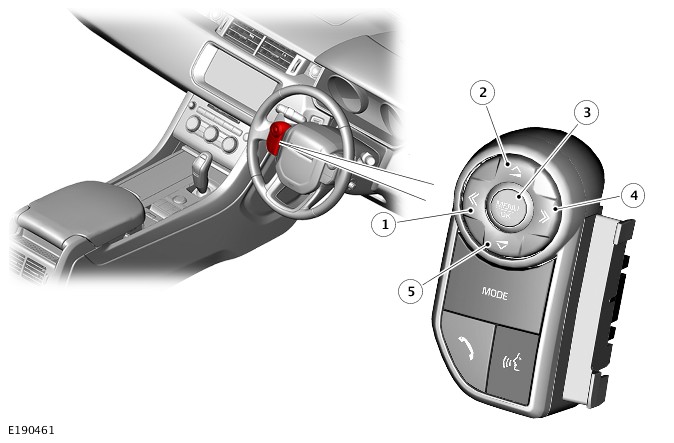
| ITEM | DESCRIPTION |
|---|---|
| 1 | Left selection switch |
| 2 | Up selection switch |
| 3 | MENU/OK switch |
| 4 | Right selection switch |
| 5 | Down selection switch |
The left steering wheel switchpack contains the controls for the Instrument Cluster (IC) menu selection. The menu switch comprises a central MENU/OK switch and a four-way switch to allow menu selection UP/DOWN/LEFT/RIGHT. The switchpack is also used to control the audio system. For additional information, refer to:Audio System (415-01, Description and Operation).
Once all current displayed messages are cleared by pressing the MENU/OK switch for each message, the IC menu is displayed with a single press of the MENU/OK switch.
The driver can navigate to the required menu using the UP/DOWN and LEFT/RIGHT switches. When the required menu is highlighted it can be selected using the MENU/OK switch.
When the 'MENU/OK' switch is pressed to select the required menu, the screen will display a sub-menu for that option or activate the selected item. Scroll arrows to the left of the menus show that additional menu items are available that are not visible in the current view. When the arrow is displayed brightly it indicates that additional menu items are available in that direction.
The current displayed menu can be closed by pressing the left switch on the menu switch. If sub-menus are open, pressing and holding the left button on the menu control will close the sub-menus. The menu will close automatically if:
- No selection is made in the main menu within 10 seconds of opening.
- A selection is made in the main menu and no further selection is made within 30 seconds. If a selection is made within the 30 second period, the timer will reset and a further 30 seconds will elapse before the menu automatically closes if no further selections are made.
- Main Menu
- Displays the available main menus.
- Driving Features
- Displays all active warning messages which can be scrolled through using the LEFT/RIGHT switches.
- Head Up Display (HUD)
- Displays the HUD options
- Trip Computer
- Functions of the trip computer
- Instrument Display
- allows the display to be customised for the driver
- Vehicle Set- Up
- Enable/Disable functions of the vehicle, for example Enable/Disable audible warning when the vehicle is locked.
- Service Menu
- Display vehicle information, for example Vehicle VIN.
HEAD UP DISPLAY CONTROL MODULE
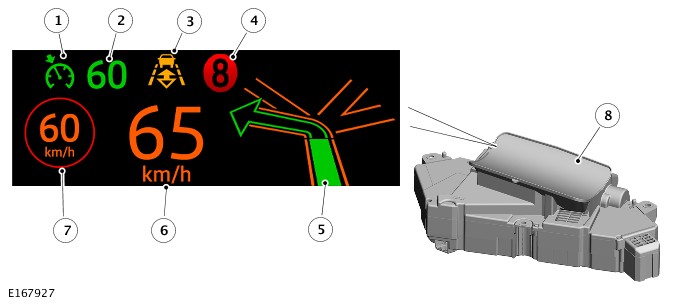
| ITEM | DESCRIPTION |
|---|---|
| 1 | Speed Control/Adaptive Speed Control Display |
| 2 | Speed Control/Adaptive Speed Control Set Speed |
| 3 | Follow Mode Warning Indicator |
| 4 | Gear Position Display |
| 5 | Navigation Turn-By-Turn Display |
| 6 | Current Vehicle Speed |
| 7 | Traffic Sign Recognition (TSR) Display |
| 8 | HUD Control Module |
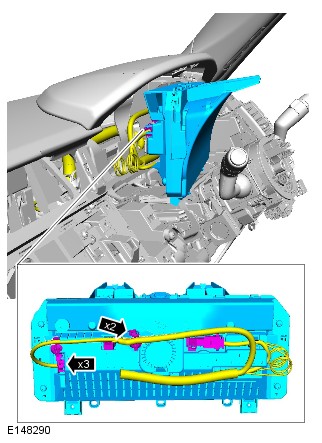
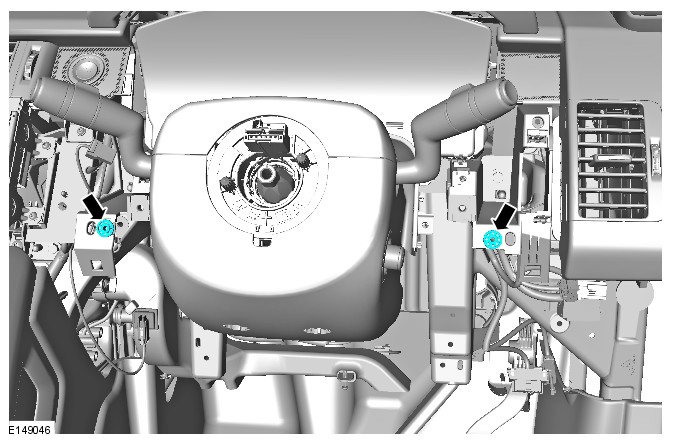
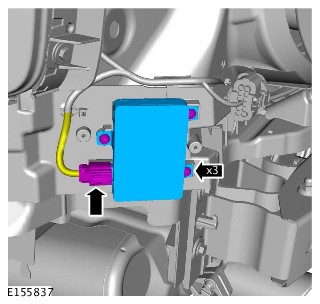
The Head Up Display (HUD) control module is located inside the instrument panel behind the Instrument Cluster (IC).
The HUD control module receives a permanent battery voltage supply via the Rear Junction Box (RJB). A High Speed (HS) Controller Area Network (CAN) comfort bus allows for the HUD control module to communicate with other modules such as the Head Up Display Cooling Fan Control Module (HUDCFCM) and the Instrument Cluster (IC).
The HUD uses laser beams within the module to provide the light source, projecting images stored within the laser diode block, via a collimating lens, onto a Liquid Crystal On Silicone (LCOS) surface, with which the beams have a phase relationship. The light is reflected off a fourier lens and a series of 'fold' mirrors to create an image on a rotating diffuser (this reduces speckle effects of the laser light). The light is magnified and distorted, in cohesion with the windscreen curvature, and passed across two further freeform curved mirrors, forming the virtual image seen by the driver.
HEAD UP DISPLAY COOLING FAN CONTROL MODULE
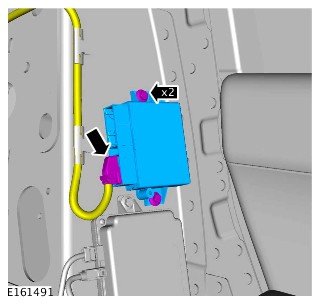
The Head Up Display Cooling Fan Control Module (HUDCFCM) is located inside the instrument panel.
The HUDCFCM is powered by the Rear Junction Box (RJB).
Information can be sent or received via the High Speed (HS) Controller Area Network (CAN) comfort bus.
The HUDCFCM controls the HUD cooling fan by using a Linear Voltage Control.
HEAD UP DISPLAY COOLING FAN MOTOR
The Head Up Display (HUD) cooling fan is located inside the instrument panel.
The HUD cooling fan is powered by the Rear Junction Box (RJB).
The HUD cooling fan is controlled by a Linear Voltage Control from the HUDCFCM.
The HUD cooling fan has a built in sensor to control temperature, so that the motor does not exceed it's operating temperature.
INSTRUMENT CLUSTER
Three processors within the Instrument Cluster (IC) manage communications between the vehicle and the IC display and incorporate the operating software required to drive screen re-configurations.
The IC receives a permanent fused supply from the Passenger Junction Box (PJB)
The IC is connected to other vehicle systems and control modules via the High Speed (HS) Controller Area Network (CAN) comfort bus, HS CAN chassis bus and the Local Interconnect Network (LIN) bus. For additional information, refer to:Audio System (415-01, Description and Operation).
The majority of information is passed to the IC from other system control modules on the HS CAN buses and LIN bus. However, some vehicle sensors are hardwired directly to the IC.
The security Light Emitting Diode (LED) is controlled by a hardwired connection from the Body Control Module/Gateway Module (BCM/GWM).
The Electric Steering Column Lock (ESCL) control module is connected to a hardwired connection to the IC. Security information from other control modules is passed via the network buses and when the conditions are correct the IC instructs the ESCL control module to unlock the steering column.
The left steering wheel switchpack is connected to the clockspring and to the IC with a LIN bus.
HEAD UP DISPLAY
The Head Up Display (HUD) is controlled from the Instrument Cluster (IC) message center menu.
When selected, the menu offers the following options:
- Selecting the position of the display on the windscreen.
- Display brightness.
- Selecting which information is displayed on the HUD.
Control of the display brightness can be adjusted in three different ways:
- As listed above, manually, from within the IC HUD control message center menu.
- If the vehicle lighting is switched on, the HUD display will adjust simultaneously with the manual adjustment of the IC panel light dimmer switch.
- Automatic brightness, controlled using data from the ambient light sensor, housed in the rain sensor.
Prior to selecting the HUD windscreen position the user should select their desired seating position. The steering wheel controls are used to set the horizontal position of the windscreen display. Once set, the information can be saved in the seat memory control system, storing the selected preferences. For additional information, refer to:Seats (501-10 Seating, Description and Operation) / Exterior Lighting (417-01 Exterior Lighting, Description and Operation).
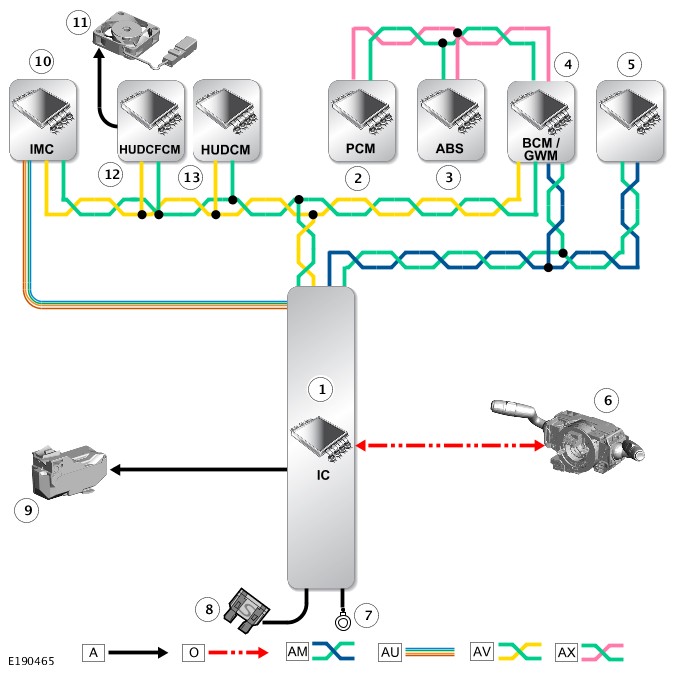
A = HARDWIRED; O = LIN BUS; AM= HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AU = AUTOMOTIVE PIXEL LINK 2 (APIX2); AV = HS CAN COMFORT BUS; AX= FLEXRAY
| ITEM | DESCRIPTION |
|---|---|
| 1 | Instrument Cluster (IC) |
| 2 | Powertrain Control Module (PCM) |
| 3 | Anti-lock Brake System Control Module (ABS) |
| 4 | Body Control Module/Gateway Module (BCM/GWM) |
| 5 | System modules on the HS CAN chassis bus |
| 6 | Steering Wheel Module (SWM) |
| 7 | Ground |
| 8 | Supply |
| 9- | Electric Steering Column Lock (ESCL) Control Module |
| 10 | Infotainment Master Controller (IMC) |
| 11 | Head Up Display cooling fan |
| 12 | Head Up Display cooling fan control module (HUDCFCM) |
| 13 | Head Up Display control module (HUDCM) |
2017.0 RANGE ROVER SPORT (LW), 413-01
INSTRUMENT CLUSTER (G2445952)
For a detailed description of the instrument cluster operation, refer to the relevant description and operation section in the workshop manual. REFER to:Instrument Cluster (413-01 Instrument Cluster, Description and Operation).
If a new instrument cluster is to be installed, using the Jaguar Land Rover approved diagnostic equipment complete the instrument cluster renewal procedure - Instrument Panel Cluster Control Module [IPC] / replace ECU. The instrument cluster subscribes to the car configuration data published over to Controller Area Network (CAN) by the body control module/gateway module. The information is used to configure the instrument cluster settings and display to the cars specific requirements
The car configuration file contains all relevant data about the specification and market condition of the applicable vehicle, immobilization codes and driver personal settings. This information is retained in the gateway module and shared with other modules over the CAN network enabling each system module to detect which systems and components are installed to the vehicle. The information is continuously transmitted by the gateway module to make sure that the data is constantly updated and backed-up in each module.
-
A risk assessment must be performed before any work is undertaken.
-
All hybrid electric vehicle work must be performed by a suitably qualified person.
-
Appropriate Personal Protection Equipment must be worn when working on or near a hybrid electric vehicle high voltage system.
-
The hybrid electric vehicle battery pack casing must not be opened due to the risk of exposure to hazardous voltage, which may cause serious injury or death.
-
The electric power inverter converter casing must not be disassembled due to the risk of exposure to hazardous voltage, which may cause serious injury or death.
-
If the hybrid electric vehicle battery pack is damaged or overcharged, there is a risk of exposure to hazardous voltage and/or highly corrosive electrolyte mist. If liquid or vapor is observed leaking from the hybrid electric vehicle battery pack, take the following action:
- Evacuate the area
- Notify manager
- Do not breathe smoke/vapor
- Contain spillage using spill kit
- Wash any spillage off body and clothing (remove contaminated clothing)
-
If the hybrid electric vehicle warning indicator is illuminated, the Battery Energy Control Module (BECM) cannot isolate the high voltage cables. Live working will be necessary to rectify the fault.
-
The motor generator can generate a voltage if the wheels are rotated, even if the hybrid electric vehicle system has been made safe.
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault and may also cause additional faults in the vehicle being checked and/or the donor vehicle
- Verify the customer concern
- Confirm which, if any, warning indicators and/or messages were displayed on the instrument cluster. For a list of messages:REFER to:Information and Message Center (413-08 Information and Message Center, Description and Operation).
- Visually inspect for obvious electrical faults
- With the ignition on, check the operation of the audio output from the instrument cluster integrated speakers by operating the turn signal indicators (left and right) and verifying that audible feedback (a ticking sound) is present
Visual inspection
| ELECTRICAL |
|---|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step
- Use the approved diagnostic system or a scan tool to retrieve any DTCs before moving onto the Diagnostic Trouble Code(s) (DTC) index
- Make sure that all DTCs are cleared following rectification
A customer may report an intermittent concern that the information button located on the left steering column stalk, when pressed does not operate the odometer information in the lower display on the instrument cluster. Normal operation will resume at the next ignition cycle.
| SYMPTOM | POSSIBLE CAUSE | ACTION |
|---|---|---|
| Left steering column stalk information button does not operate the odometer menu | Instrument cluster software compatibility issue |
NOTE:
This update requires a Jaguar Land Rover approved diagnostic tool using Pathfinder version 110 or later
|
For a complete list of all diagnostic trouble codes that could be set on this vehicle, please refer to section 100-00. REFER to:Diagnostic Trouble Code Index - DTC: Instrument Cluster (IC) - Conventional display (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Instrument Cluster - Virtual Display (IC) (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Head-Up Display (HUD) (100-00 General Information, Description and Operation).
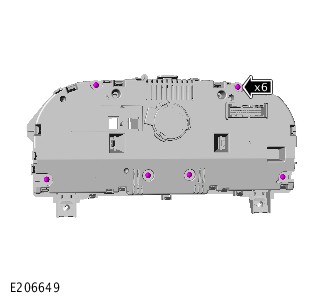
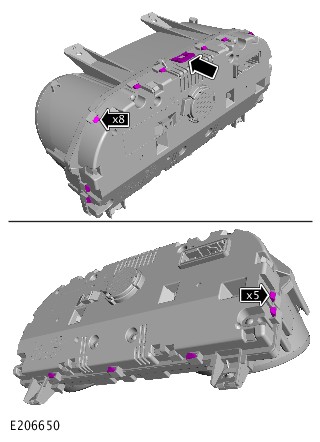
Removal and InstallationINSTRUMENT CLUSTER (G1606042)
- 88.30.38
- INSTRUMENT PACK ASSEMBLY - RENEW
- ALL DERIVATIVES
- 0.40
- USED WITHINS
-
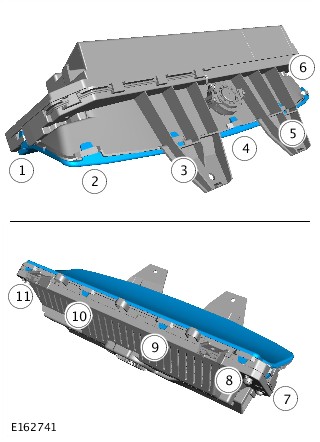
This procedure contains some variation in the illustrations depending on the vehicle specification, but the essential information is always correct.
-
This procedure contains illustrations showing certain components removed to provide extra clarity.
-
When a new instrument cluster is to be installed, the Land Rover approved diagnostic system must be connected to the vehicle and the instrument cluster renewal procedure followed.
-
For non-NAS markets - if a new instrument cluster is to be installed, a new Remote Function Actuator (RFA) will be required. All vehicle keys must be presented to complete the RFA renewal.
- Disconnect the battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).

If a new component is installed.
- To install, reverse the removal procedure.
-
Install a new Remote Function Actuator (RFA).NOTES:
-
Only complete this step if a new instrument cluster is to be installed.
-
Non-NAS Markets only.
-
SRO must be claimed separately.
Refer to:Keyless Vehicle Module (419-10 Multifunction Electronic Modules, Removal and Installation). -
- Using the diagnostic tool, configure the instrument cluster.
2017.0 RANGE ROVER SPORT (LW), 413-01
INSTRUMENT CLUSTER
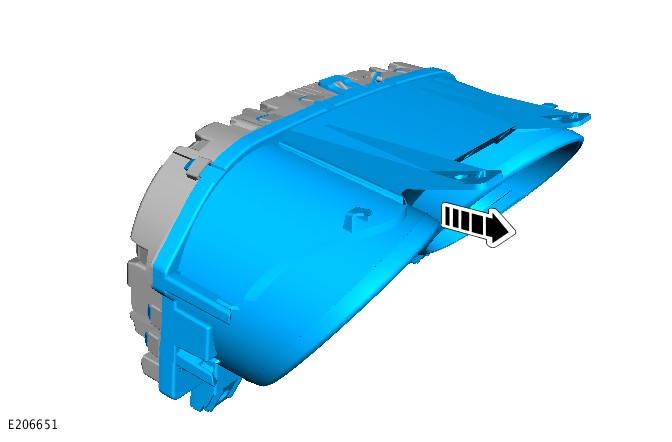
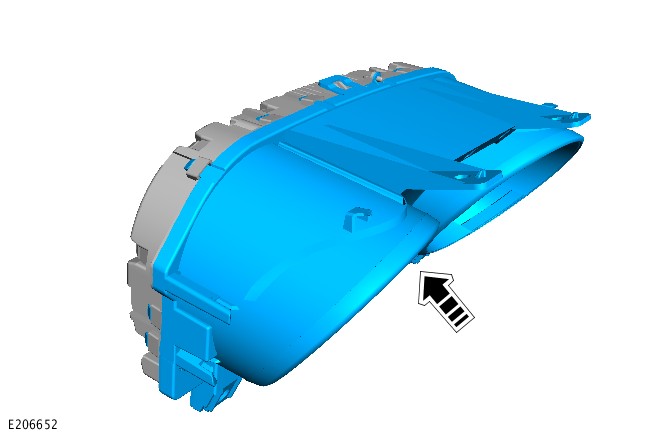
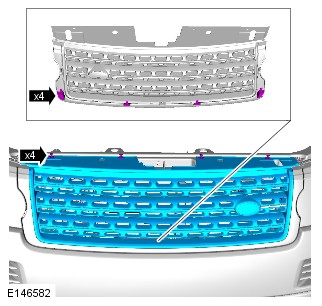
VIRTUAL INSTRUMENT CLUSTER LENS (G2152832)
- Disconnect the startup battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
- Remove the instrument cluster
Refer to:Instrument Cluster (413-01 Instrument Cluster, Description and Operation).
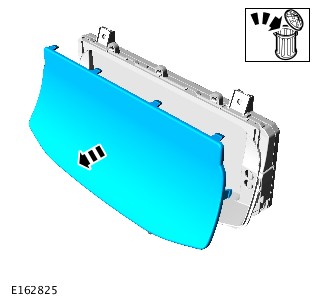
- Install the instrument cluster.
Refer to:Instrument Cluster (413-01 Instrument Cluster, Removal and Installation).
- Connect the startup battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
- Reset the steering column to the original position.
2017.0 RANGE ROVER SPORT (LW), 413-01
INSTRUMENT CLUSTER
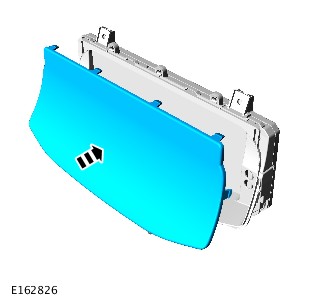
CONVENTIONAL INSTRUMENT CLUSTER LENS (G2152833)
- Disconnect the startup battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
- Remove the instrument cluster.
Refer to:Instrument Cluster (413-01 Instrument Cluster, Removal and Installation).
- Install the instrument cluster.
Refer to:Instrument Cluster (413-01 Instrument Cluster, Removal and Installation).
- Connect the startup battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
- Reset the steering column to the original position.
413-06: Horn
Diagnosis and Testing
2017.0 RANGE ROVER SPORT (LW), 413-06
HORN (G1880417)
For a detailed description of the horn system and operation, refer to the relevant Description and Operation section of the workshop manual.
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault and may also cause additional faults in the vehicle being checked and/or the donor vehicle.
Check and rectify basic faults before beginning diagnostic routines involving pinpoint tests.
- Verify the customer concern.
- Visually inspect for obvious signs of mechanical or electrical damage.
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step.
- If the cause is not visually evident, verify the symptom and refer to the Symptom Chart, alternatively check for Diagnostic Trouble Codes (DTCs) and refer to the DTC Index.
| SYMPTOM | POSSIBLE CAUSES | ACTION |
|---|---|---|
| Horn(s) operate with a muffled tone |
|
|
| Horn(s) inoperative |
For a list of Diagnostic Trouble Codes (DTCs) that could be logged on this vehicle, please refer to Section 100-00. REFER to:Diagnostic Trouble Code Index - DTC: Body Control Module (BCM) (100-00 General Information, Description and Operation).
Removal and Installation2017.0 RANGE ROVER SPORT (LW), 413-06
HORN (G1551356)
Removal steps in this procedure may contain installation details.
- Disconnect the battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
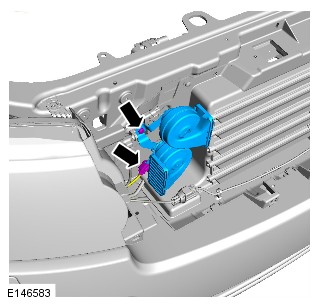
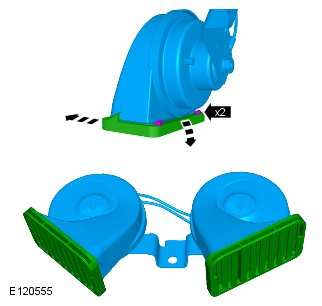
- To install, reverse the removal procedure.
413-08: Information and Message Center
2017.0 RANGE ROVER SPORT (LW), 413-08
INFORMATION AND MESSAGE CENTER (G1770468)
Torque Specifications
| ITEM | NM | LB-FT | LB-IN |
|---|---|---|---|
| Head up display (HUD) retaining screw | 5 | - | 44 |
| Demist duct to instrument panel retaining screw | 1.5 | - | 13 |
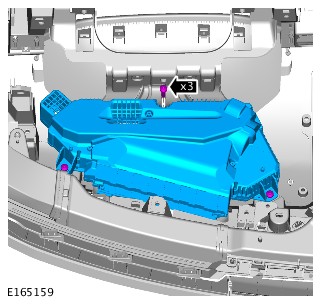
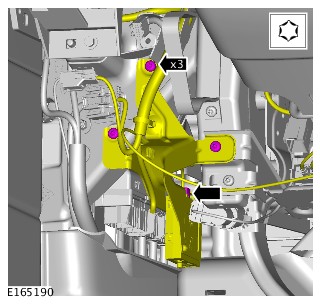
| HUD cooling fan motor to support bracket retaining nut and bolt | 1.5 | - | 13 |
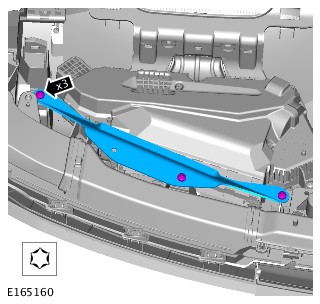
| HUD cooling fan motor support bracket to cross car beam nut | 1.5 | - | 13 |
| HUD control module to support bracket retaining screw | 1.5 | - | 13 |
Description and Operation
2017.0 RANGE ROVER SPORT (LW), 413-08
INFORMATION AND MESSAGE CENTER (G1950057)
The Instrument Cluster (IC) is a high definition Thin Film Transistor (TFT) display. The display is continually reconfigured to prioritise and refine the information presented to the driver.
For additional information, refer to:Instrument Cluster (413-01 Instrument Cluster, Description and Operation).
Diagnosis and Testing2017.0 RANGE ROVER SPORT (LW), 413-08
INFORMATION AND MESSAGE CENTER (G2018603)
For a detailed description of the information and entertainment system and operation, refer to the relevant Description and Operation section of the workshop manual. REFER to:Information and Message Center (413-08 Information and Message Center, Description and Operation).
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault and may also cause additional faults in the vehicle being checked and/or the donor vehicle.
Check and rectify basic faults before beginning diagnostic routines involving pinpoint tests.
- Verify the customer concern.
- Visually inspect for obvious signs of mechanical or electrical damage.
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step.
- If the cause is not visually evident, check for Diagnostic Trouble Codes (DTCs) and refer to the DTC Index.
For a list of Diagnostic Trouble Codes (DTCs) that could be logged on this vehicle, please refer to Section 100-00. REFER to:Diagnostic Trouble Code Index - DTC: Instrument Cluster (IC) - Conventional display (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Instrument Cluster - Virtual Display (IC) (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Head-Up Display (HUD) (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Head-Up Display Cooling Fan Control Module (100-00 General Information, Description and Operation).
Removal and InstallationINFORMATION AND MESSAGE CENTER
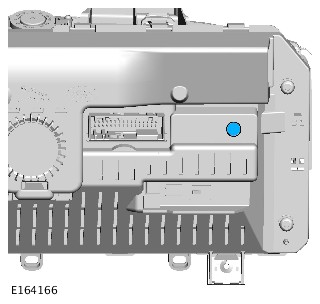
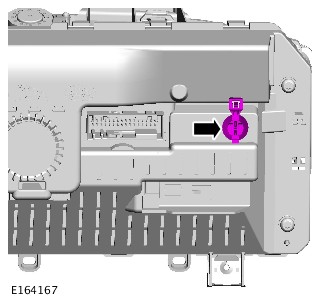
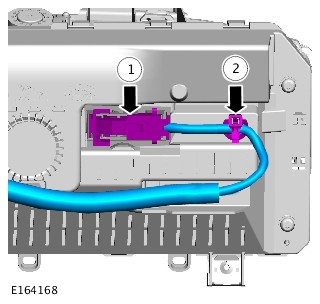
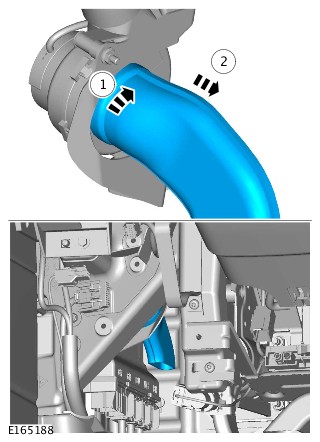
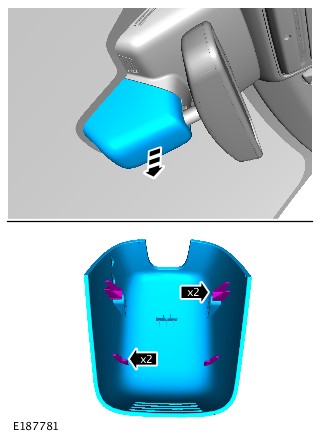
HEAD UP DISPLAY (G1770469)
- 88.20.31
- HEAD-UP DISPLAY (HUD) UNIT - RENEW
- ALL DERIVATIVES
- 5.90
- USED WITHINS
GENERAL EQUIPMENT
| EQUIPMENT NAME |
|---|
| Jaguar Land Rover approved diagnostic equipment |
Removal steps in this procedure may contain installation details.
- Disconnect the battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
-
Refer to:Instrument Panel Upper Section (501-12 Instrument Panel and Console, Removal and Installation).
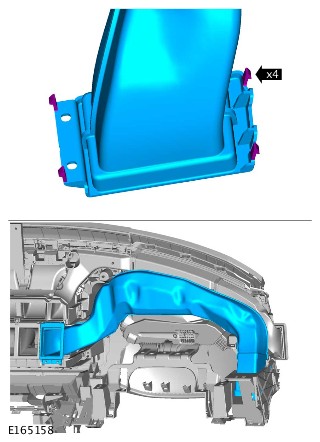
- To install, reverse the removal procedure.
-
NOTES:
-
This step is only required if a new component is installed.
-
SRO to be claimed separately.
- Use the Jaguar Land Rover (JLR) approved diagnostic equipment to configure the new module.
- Follow all on-screen instructions to complete this task.
-
2017.0 RANGE ROVER SPORT (LW), 413-08
INFORMATION AND MESSAGE CENTER
HEAD UP DISPLAY CONTROL MODULE (G1770470)
- 86.80.03
- CONTROL MODULE - HUD COOLING FAN - RENEW
- ALL DERIVATIVES
- 1.50
- USED WITHINS
Removal steps in this procedure may contain installation details.
-
Refer to:Instrument Panel Lower Section (501-12 Instrument Panel and Console, Removal and Installation).
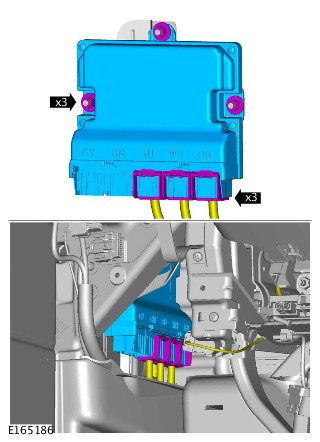
- To install, reverse the removal procedure.
- If a new component is to be installed, configure using Land Rover approved diagnostic equipment.
2017.0 RANGE ROVER SPORT (LW), 413-08
INFORMATION AND MESSAGE CENTER
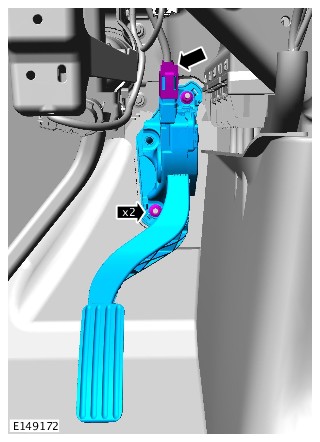
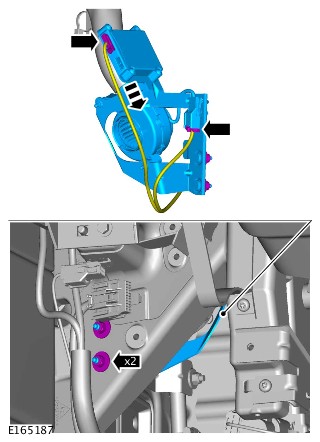
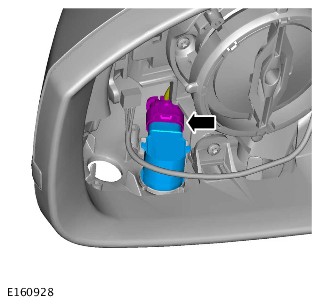
HEAD UP DISPLAY COOLING FAN MOTOR (G1770471)
- 88.20.32
- COOLING FAN - HUD UNIT - RENEW
- ALL DERIVATIVES
- 1.50
- USED WITHINS
Removal steps in this procedure may contain installation details.
-
Refer to:Instrument Panel Lower Section (501-12 Instrument Panel and Console, Removal and Installation).
- To install, reverse the removal procedure.
413-09: Warning Devices
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES (G1702322)
Torque Specifications
| DESCRIPTION | NM | LB-FT | LB-IN |
|---|---|---|---|
| Low tire pressure module retaining bolts | 10 | 7 | - |
| General proximity sensor module (GPMS) retaining bolts | 10 | 7 | - |
| Blind spot monitoring sensor bracket retaining bolts | 1.9 | - | 17 |
| Blind spot monitoring sensor retaining bolts | 1.9 | - | 17 |
Description and Operation
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
BLIND SPOT MONITORING SYSTEM (G1951788)
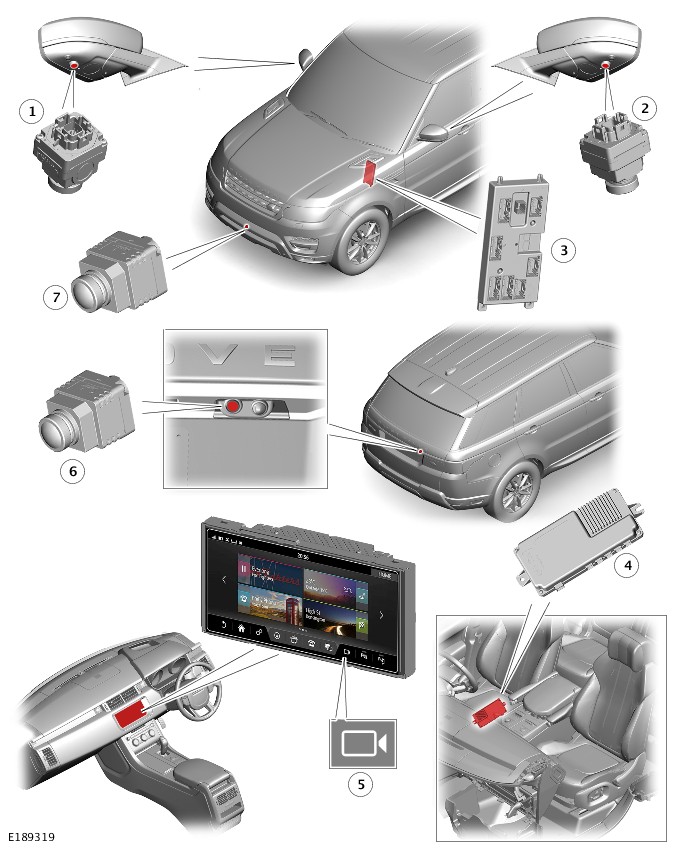
Right Hand Drive (RHD) illustration is shown. The Left Hand Drive (LHD) illustration is similar.
| ITEM | DESCRIPTION |
|---|---|
| 1 | Anti-lock Brake System Control Module (ABS) |
| 2 | Instrument Cluster (IC) |
| 3 | Driver door mirror |
| 4 | Driver Door Module (DDM) |
| 5 | Blindspot Monitoring Control Module (BMCM) - right |
| 6 | Blindspot Monitoring Control Module (BMCM) - left |
| 7 | Passenger Door Module (PDM) |
| 8 | Body Control Module/Gateway Module (BCM/GWM) |
| 9 | Passenger door mirror |
Eliminating blind spots is a major element in vehicle body design, but because of the structural requirements of B, C and D pillars, blind spots cannot be entirely eliminated, so blind spot monitoring is there to help assist the driver safely crossover in moving traffic.
Blindspot monitoring comprises:
- Blindspot Monitoring Control Module (BMCM) - right
- Blindspot Monitoring Control Module (BMCM) - left
- Driver Door Mirror Assembly
- Passenger Door Mirror Assembly
The system uses two radar sensors operating at a frequency of 24GHz, they are incorporated in each of a BMCM, that are located at the rear of the vehicle (one module each side) behind each of the rear wheels and are connected via a private HS (high speed) Controller Area Network (CAN) bus to exchange information.
These modules will warn the driver of the presence of vehicles in a defined closing vehicle warning zone, or if a vehicle enters the blind spot warning zone, which poses a threat to the driver if a lane change manoeuver is made.
Each BMCM has an 8 way connector that has power, ground, HS (high speed) CAN comfort bus wires, two private bus wires and two hard wire connections one to the status light and one for the alert icon in the mirror.
The BMCM carries out an auto-alignment self-check every time when in use, this procedure can take up to an hour in some environments, however the operation of the blindspot monitoring system will continue to operate as normal.
Each module will detect a vehicle in the driver’s blind spot. Once the vehicle is detected the module illuminates an amber warning ‘alert icon’ Light Emitting Diode (LED) in the relevant exterior door mirror.
If the system displays ‘blind spot not available’ and there is a misalignment trouble code in the system, the physical sensors must be checked for mounting and body work should be checked for damage or repair.
When the system initiates, it performs a self-check, during which the warning icons in the mirrors illuminate alternately for a short period of time. Each module does a left/right determination check when the ignition is switched on. Each mirror has a different circuit configuration so that the modules can determine which mirror they are connected to. If a module detects the wrong mirror it will go into a fault condition.
The system activates when the speed is greater than 16 km/h (10 mph) and remains active until the speed lowers below 5 km/h (3 mph)
The blind spot monitoring system is designed as a driver aid not a safety device. The driver should always exercise due care and attention whilst driving.
The blindspot monitoring uses a cross over radar pattern to the rear of the vehicle and is used to determine actual moving vehicles eliminating any stationary roadside objects which are false warnings.
The two radar sensors mounted at the rear of the vehicle will continuously scan for and track traffic on the areas to the left-rear and right-rear of the vehicle and they can also track vehicles from as far as 73 meters.
They will warn the driver of the presence of vehicles in a defined closing vehicle warning zone, which poses a threat to the driver if a lane change manoeuver is made.
The driver will be notified of the threat by flashing the existing blind spot icon in the relevant door mirror.
If an overtaking vehicle is detected on both sides of the vehicle simultaneously, the warning alert icons in both mirrors will illuminate.
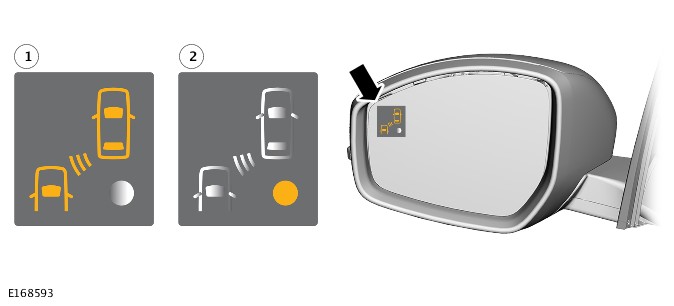
The blindspot monitoring lenses are shaped so as to minimize the visibility to other drivers. The Light Emitting Diodes (LED) are located towards the outside extremity of the mirror face, within the peripheral view of the driver but not in any area of the mirror where they could obscure or distract from the image.
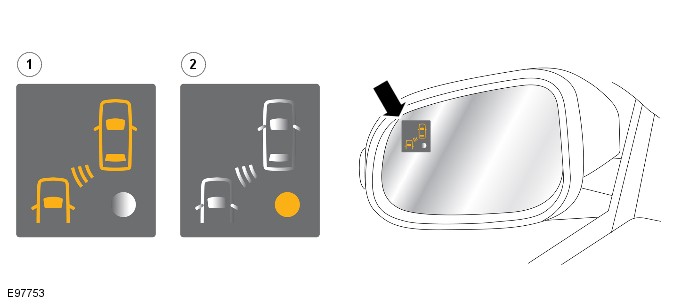
| ITEM | DESCRIPTION |
|---|---|
| 1 | Warning alert icon |
| 2 | System status warning indicator |
The Light Emitting Diode (LED) lighting sequence is as follows;
- Amber alert LED icon permanently lit - system operational, vehicle detected in blind spot area.
- No LED lit – system active no vehicle detected in blind spot area.
- Amber status LED permanently lit - system not active or faulty.
The system has operating limitations and is automatically turned off under certain operating conditions. During these operating conditions the amber status LED is permanently lit.
The system operating limitations are as follows;
- The system is inactive until vehicle speed is greater than 16 Km/h (10 mph) (amber status LED permanently lit).
- The system is inactive if an approved trailer is connected to the vehicle (amber status LED permanently lit).
- The system is inactive when reverse gear or park is selected (amber status LED permanently lit).
If either of the radar signals are blocked or distorted, for example by water, the radar face of the module is covered in mud, sleet or snow the system may detect this and be disabled with the amber status LED permanently lit together with a ‘blind spot monitoring blocked’ message displayed in the instrument cluster message center. The system is disabled until the blockage is cleared.
If there is a fault in the system the amber status LED is permanently lit and a ‘blindspot monitoring not available’ message displayed in the Instrument Cluster (IC) message center. The system is disabled until the fault is rectified.
System fault and blockage warnings are as follows;
- The system is disabled when the radar module signal is blocked (amber status LED permanently lit and instrument cluster message).
- The system is disabled by a fault (amber status LED permanently lit and instrument cluster message).
If there is a failure in the communication network and the warning LED cannot be displayed in the mirror, a failure message will be displayed in the instrument cluster message center.
When any faults are present in the system, Diagnostic Trouble Codes (DTC) are stored in both Blindspot Monitoring Control Modules (BMCM) appropriate to each module. Replacement of modules requires the modules to be configured using the Land Rover approved diagnostic equipment.
Calibration of the modules using the Land Rover approved diagnostic equipment enables updates to be downloaded as new technology becomes available or any fault concerns require software updates.
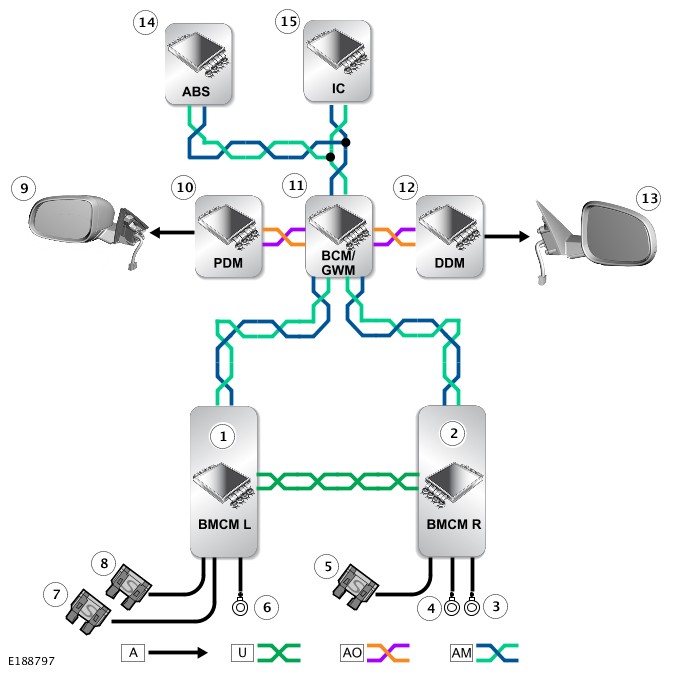
A = HARDWIRED; U = PRIVATE BUS; AM = HS (HIGH SPEED) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AO = MS (MEDIUM SPEED) CAN BODY BUS.
| ITEM | DESCRIPTION |
|---|---|
| 1 | Blindspot Monitoring Control Module (BMCM) - left |
| 2 | Blindspot Monitoring Control Module (BMCM) - right |
| 3 | ground |
| 4 | ground |
| 5 | supply |
| 6 | ground |
| 7 | supply |
| 8 | supply |
| 9 | Passenger door mirror |
| 10 | Passenger Door Module (PDM) |
| 11 | Body Control Module/Gateway Module (BCM/GWM) |
| 12 | Driver Door Module (DDM) |
| 13 | Driver door mirror |
| 14 | Anti-lock Brake System Control Module (ABS) |
| 15 | Instrument Cluster (IC) |
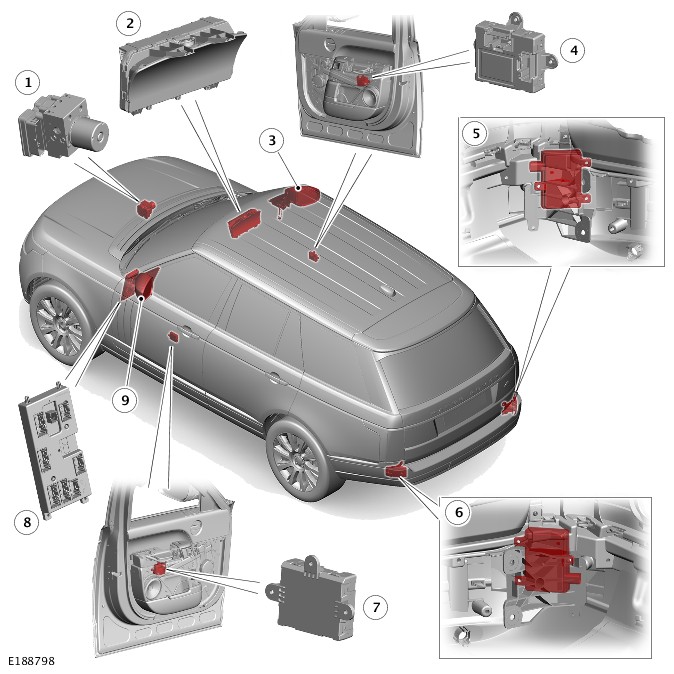
Warning Devices
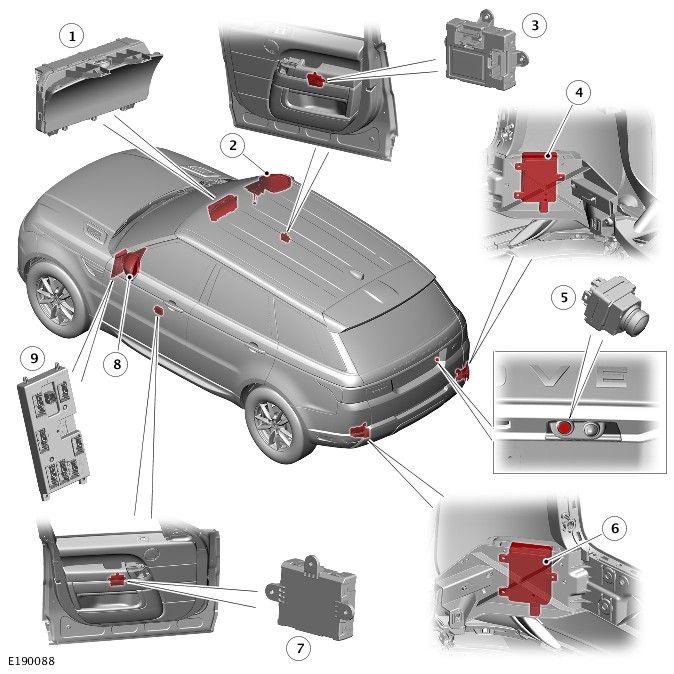
WARNING DEVICES (G1961826)
| ITEM | DESCRIPTION |
|---|---|
| 1 | Anti-lock Brake System Control Module (ABS) |
| 2 | Instrument Cluster (IC) |
| 3 | Driver door mirror |
| 4 | Driver Door Module (DDM) |
| 5 | Blindspot Monitoring Control Module (BMCM) - right |
| 6 | Blindspot Monitoring Control Module (BMCM) - left |
| 7 | Passenger Door Module (PDM) |
| 8 | Body Control Module/Gateway Module (BCM/GWM) |
| 9 | Passenger door mirror |
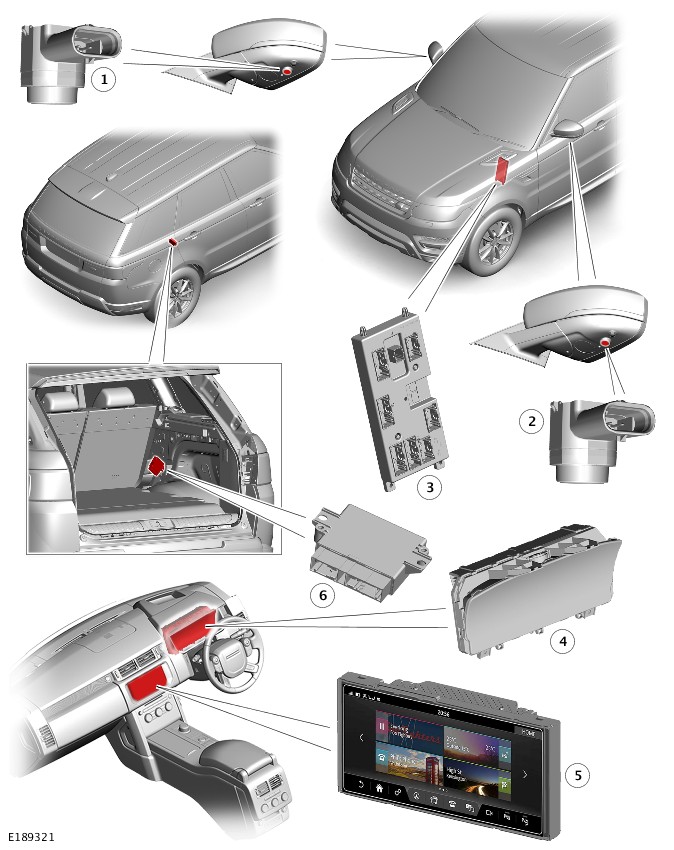
| ITEM | DESCRIPTION |
|---|---|
| 1 | Instrument Cluster (IC) |
| 2 | Driver door mirror |
| 3 | Driver Door Module (DDM) |
| 4 | Blindspot Monitoring Control Module (BMCM) - Right |
| 5 | Rear View Camera (RVC) |
| 6 | Blindspot Monitoring Control Module (BMCM) - Left |
| 7 | Passenger Door Module (PDM) |
| 8 | Passenger door mirror |
| 9 | Body Control Module/Gateway Module (BCM/GWM) |
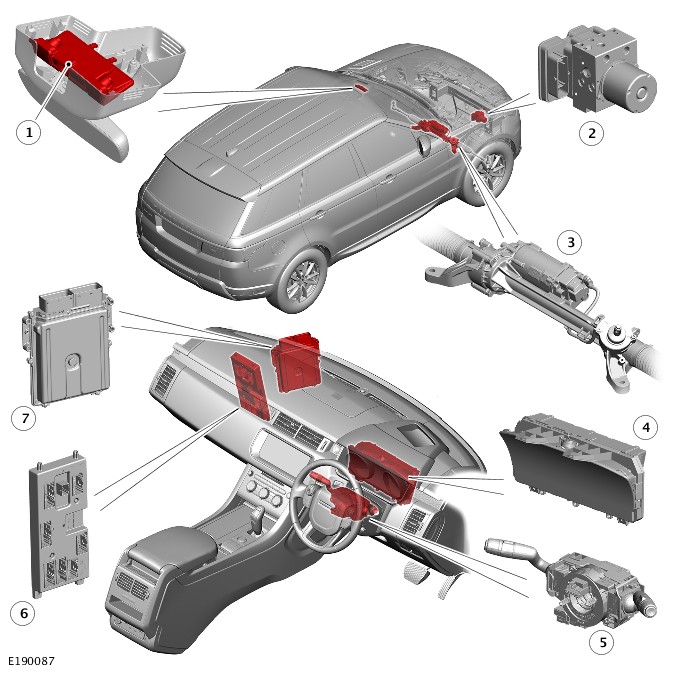
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | Anti-lock Brakes System Control Module (ABS) |
| 3 | Power Steering Control Module |
| 4 | Instrument Cluster (IC) |
| 5 | Steering Wheel Module (SWM) |
| 6 | Body Control Module/Gateway Module (BCM/GWM) |
| 7 | Powertrain Control Module (PCM) |

| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | Anti-lock Brakes System Control Module (ABS) |
| 3 | Instrument Cluster (IC) |
| 4 | Infotainment Master Controller (IMC) |
| 5 | Body Control Module/Gateway Module (BCM/GWM) |
| 6 | Powertrain Control Module (PCM) |
| 7 | Head up Display (HUD) |
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | Adaptive Speed Control Module (ASCM) |
| 3 | Anti-lock Brakes System Control Module (ABS) |
| 4 | Head up Display (HUD) |
| 5 | Instrument Cluster (IC) |
| 6 | Steering Wheel Module (SWM) |
| 7 | Restraint Control Module (RCM) |
| 8 | Body Control Module/Gateway Module (BCM/GWM) |
| 9 | Powertrain Control Module (PCM) |

| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | Anti-lock Brakes System Control Module (ABS) |
| 3 | Head up Display (HUD) |
| 4 | Instrument Cluster (IC) |
| 5 | Steering Wheel Module (SWM) |
| 6 | Body Control Module/Gateway Module (BCM/GWM) |
| 7 | Powertrain Control Module (PCM) |
BLINDSPOT MONITORING
Blindspot monitoring is a feature to assist the driver safely crossover in moving traffic.
In addition to the functionality provided by blindspot monitoring, the approaching vehicle sensing system monitors a larger area behind the vehicle.
Reverse Traffic Detection (RTD) is a further enhancement to blindspot monitoring. This will inform the driver if a vehicle is approaching when in the reversing mode.
Blindspot monitoring comprises off:
- Two Blindspot Monitoring Control Modules (BMCM)
- Door mirror warning lamp - Right
- Door mirror warning lamp - Left
- Passenger Door Module (PDM)
- Driver Door Module (DDM).
APPROACHING VEHICLE SENSING
The Approaching Vehicle Sensing (AVS) uses Blindspot Monitoring function to view a larger area to the rear of the vehicle.
AVS uses the same principle as the BlindSpot Monitoring.
It warns the driver that a vehicle is approaching but is not yet in the blindspot area.
LANE DEPARTURE WARNING AND LANE KEEP ASSIST
Lane Departure Warning (LDW) is designed to warn the driver when the vehicle drifts out of lane.
Lane Keep Assist (LKA) is an additional aid to help the driver to keep the vehicle in the current lane by applying a gentle steering wheel torque when the vehicle is unintentionally drifting out of the lane.
The LDW and LKA systems use the Image Processing Module (IPM) that monitors the road ahead. When the vehicle begins to drift from the lane, the IPM will alert the driver by vibrating the steering wheel.
The LDW system includes the LKA, Autonomous Emergency Braking (AEB) and Driver Drowsiness Detection.
TRAFFIC SIGN RECOGNITION
Traffic Sign Recognition (TSR) uses the Image Processing Module (IPM) to identify traffic signs on either side of the road and on bridges, providing the driver with information about the latest detected speed limit, cancellation signs and overtaking regulations via the Instrument Cluster (IC) display and Head Up Display (HUD).
AUTONOMOUS EMERGENCY BRAKING
Autonomous Emergency Braking (AEB) combines two functionalities:
- A forward collision warning informs the driver of a collision risk concerning the vehicle ahead, providing the driver with an opportunity to avoid the situation by braking or steering.
- If the driver does not react, Intelligent Emergency Braking (IEB) applies full braking, with the aim to avoid or limit the collision impact velocity.
Autonomous Emergency Braking (AEB) is an enhanced version of Intelligent Emergency Braking (IEB).
The system uses an Image Processing Module (IPM), mounted adjacent to the rear view mirror, to capture a view of the road ahead.
The IPM hosts the AEB feature.
The AEB provides the following functions:
- Activates an audible collision risk warning to the driver
- Activates a visual driver warning
- Automatically applies the braking system
- Provides a confirmation message to the driver that the system has been triggered.
The system will only be operational when driving on normal roads. AEB will have reduced performance when the vehicle is off-road. However it is advised that the system is deactivated while driving off road.
DRIVER DROWSINESS DETECTION
Driver Drowsiness Detection is an aid to observe the drivers behavior by monitoring driving technique for signs of driver fatigue. If the system determines the driver is fatigued, it will issue a multi stage warning to the driver which will be displayed in the Instrument Cluster (IC) message center.
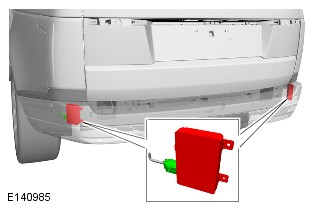
BLINDSPOT MONITORING CONTROL MODULE
Blindspot monitoring is designed as a driver aid not a safety device. The driver should always exercise due care and attention whilst driving.
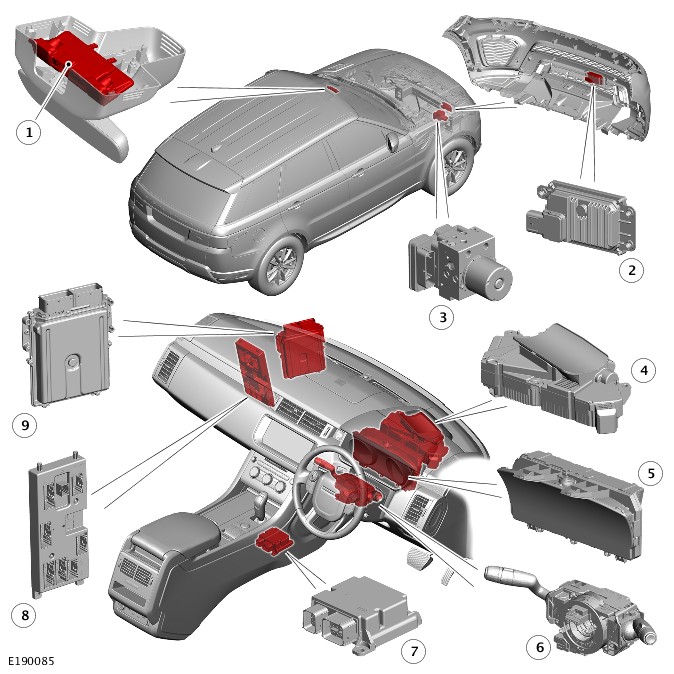
There are two Blindspot Monitoring Control Modules (BMCM) and they are located in the corner of the rear bumper, one on each side.
Each BMCM connector has power, ground, HS (high speed) Controller Area Network (CAN) comfort bus wires, and two private CAN wires.
The system uses two radar sensors; they are incorporated in each of a BMCMs, that are located at the rear of the vehicle (one module each side) and are connected via a private Controller Area Network (CAN) bus to exchange information.
Each BMCM carries out an auto-alignment self-check every time when in use. This procedure can take up to an hour in some environments; however the operation of the blindspot monitoring system will continue to operate as normal.
The blind spot monitoring modules receive vehicle speed on the HS CAN comfort bus. The system activates at 15km/h (9 mph) and remains active until the speed lowers below 5km/h (3mph).
IMAGE PROCESSING MODULE
The Image Processing Module (IPM) is able to detect road lane markings, traffic sign markings and monitor the road ahead for Lane Departure Warning (LDW), Traffic Sign Recognition (TSR) and Autonomous Emergency Braking (AEB) systems.
The IPM is located in the rear view mirror.
The IPM is a module that has two built in forward facing cameras. The IPM receives an ignition supply from the Rear Junction Box (RJB) and information can be exchanged from the IPM via the High Speed (HS) Controller Area Network (CAN) chassis bus to the other modules.
BLINDSPOT MONITORING CONTROL MODULE
Blindspot monitoring uses a cross over radar pattern to the rear of the vehicle and is used to determine actual moving vehicles eliminating any stationary roadside objects.
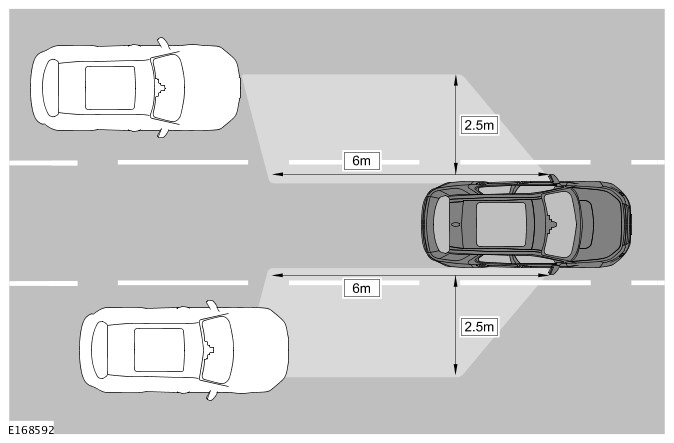
The system monitors an area extending from the exterior mirrors rearwards, to approximately 6 metres (20 feet) behind the rear wheels, and up to 2.5 metres (8.2 feet) from the side of the vehicle.
The driver will be alerted, with a solid warning light emitting diode (LED) in the relevant door mirror.
The system will warn the driver of the presence of vehicles in a defined closing vehicle warning zone, which poses a hazard to the driver if a lane change manoeuver is made.
The driver will be notified of the hazard by flashing the existing blindspot icon in the relevant door mirror.
If an overtaking vehicle is detected on both sides of the vehicle simultaneously, the warning alert icons in both mirrors will illuminate.
The Light Emitting Diodes (LED) are located towards the outside extremity of the mirror face, within the peripheral view of the driver but not in any area of the mirror where they could obscure or distract from the image.
| ITEM | DESCRIPTION |
|---|---|
| 1 | Warning Alert Icon |
| 2 | System Status Warning Indicator |
The LED lighting alerts are as follows:
- Amber alert LED icon permanently lit - System operational, vehicle detected in blind spot area.
- No LED's lit – System active no vehicle detected in blind spot area.
- Amber status LED permanently lit - System not active or faulty.
- Amber alert LED icon flashing – System operational, potential hazard.
The system has operating limitations and is automatically turned off under certain operating conditions. During these operating conditions the amber status LED is permanently lit.
The system operating limitations are as follows:
- The system is inactive until vehicle speed is greater than 16 km/h (10 mph) (amber status LED permanently lit).
- The system is inactive if an approved trailer is connected to the vehicle (amber status LED permanently lit).
- The system is inactive when reverse gear or park is selected (amber status LED permanently lit).
If Reverse Traffic Detection (RTD) is fitted the standby dot will be off when reverse is selected indicating that the system is active. If RTD is not fitted then the standby dot will be on indicating that the system is not active.
If either of the radar signals generated by the Blindspot Monitoring Control Module (BMCM) are blocked or distorted by for example:
- water
- mud
- sleet
- snow
the system may detect this and be disabled with the amber status LED permanently lit together with a ‘blindspot monitoring blocked’ message displayed in the Instrument Cluster (IC) message center.
The system is disabled until the blockage is cleared.
If there is a fault in the system the amber status LED is permanently lit and a ‘blindspot monitoring not available’ message displayed in the IC message center. The system is disabled until the fault is rectified.
System fault and blockage warnings are as follows:
- The system is disabled when the radar module signal is blocked (amber status LED permanently lit and IC message).
- The system is disabled by a fault (amber status LED permanently lit and IC message).
If there is a failure in the communication network and the warning LED cannot be displayed in the mirror, a failure message will be displayed in the IC message center.
When any faults are present in the system, Diagnostic Trouble Codes (DTC) are stored in both Blindspot Monitoring Control Modules (BMCM) appropriate to each module. Replacement of modules requires the modules to be configured using the Land Rover approved diagnostic equipment.
Calibration of the modules using the Land Rover approved diagnostic equipment enables updates to be downloaded as new technology becomes available or any fault concerns require software updates.
APPROACHING VEHICLE SENSING
Approaching Vehicle Sensing (AVS) operates in the same principle as blindspot monitoring however AVS will monitor a larger area extending from the back of the of the blindspot monitoring zone, to approximately 70 metres (230 feet) behind the rear wheels, and up to 2.5 metres (8.2 feet) from the side of the vehicle.
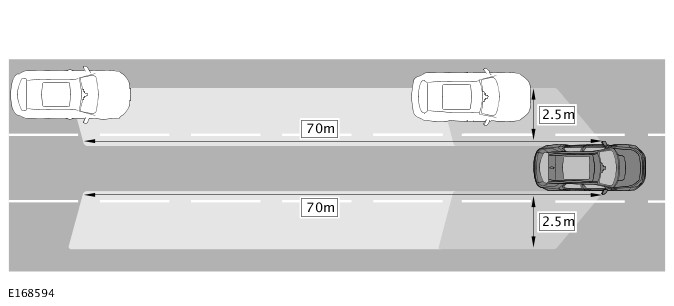
This is to alert the driver to the presence of rapidly approaching vehicle beyond the blindspot.
When a vehicle is detected by the system, the following LED lighting sequence will occur:
- Amber alert Light Emitting Diode (LED) icon flashing – System operational, potential hazard.
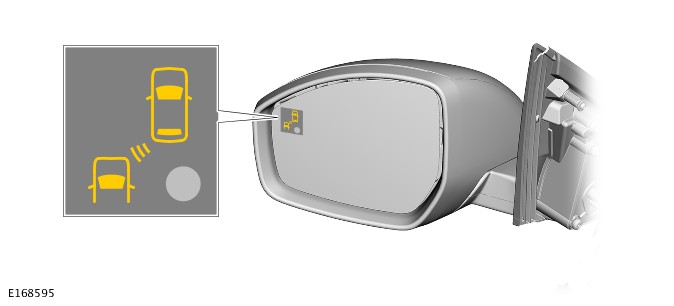
| ITEM | DESCRIPTION |
|---|---|
| 1 | Warning Alert Icon |
REVERSE TRAFFIC DETECTION
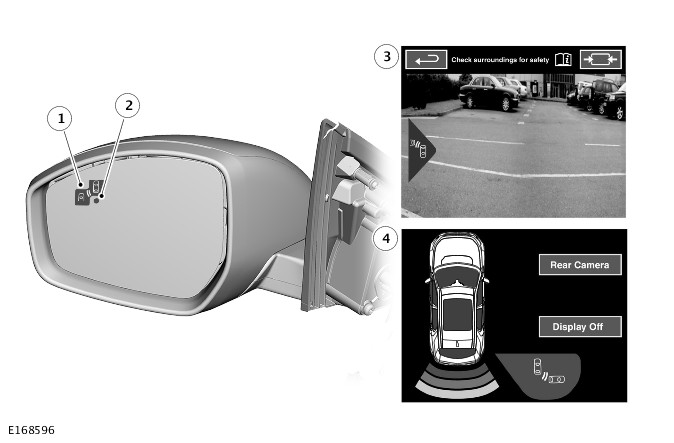
| ITEM | DESCRIPTION |
|---|---|
| 1 | Warning Alert Icon |
| 2 | System Status Warning Indicator |
| 3 | Rear View Camera (RVC) Screen |
| 4 | Parking Aid Screen |
The Rear View Camera (RVC) and parking aid screen will also show a warning on the relevant side or sides of which a vehicle is approaching on.
The Reverse Traffic Detection (RTD) system will automatically disable if any of the radars become partially or completely obscured. The amber warning indicator dot will illuminate in the exterior mirrors and the message 'Reverse Traffic Sensor Blocked' appears in the message center.
LANE DEPARTURE WARNING
Lane Departure Warning (LDW) continuously monitors the position of the vehicle relative to the road markings. If the vehicle drifts from the centre of the lane and the system does not detect an obvious lane change manoeuvre or use of the direction indicators, the vibration alert is triggered. The alert is reinforced by a graphical warning, displayed in the Instrument Cluster (IC), which is used to inform the driver when the vehicle is tracking left or right of the lane markers.
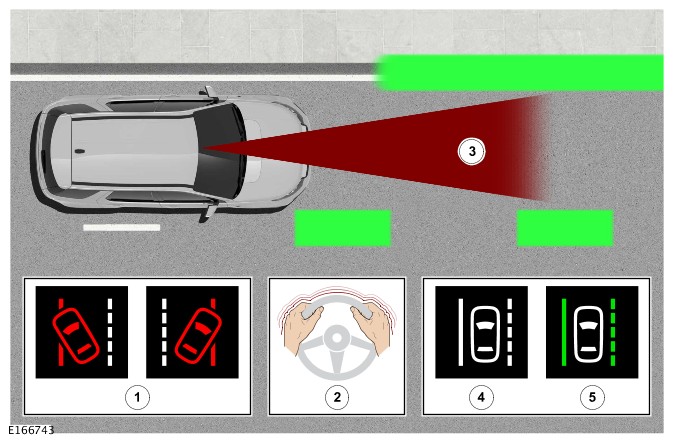
| ITEM | DESCRIPTION |
|---|---|
| 1 | Instrument Cluster (IC) or Head Up Display (HUD) Graphical Warning |
| 2 | Steering Wheel Feedback |
| 3 | Image Processing Module (IPM) Surveillance |
| 4 | System in standby mode |
| 5 | System in operational mode |
Lane detection is determined by processing the forward looking camera’s image data, within the Image Processing Module (IPM), and making measurements against the road lane markers.
Examples of lane markers are:
- solid
- broken
- white
- yellow
Vehicle velocity and yaw rate signals are used for lane detection corrections.
The decision to warn the driver is based on processed image data from the forward looking cameras, and key driver inputs such as direction indicator switch, brake pressure, accelerator position and steering wheel angle.
Lane tracking is only possible when lane markers are clearly visible, vehicle speed is above 60 km/h (37 mph) and below 150 km/h (93 mph). The system is deactivated below 60 km/h (37 mph) to avoid interference in urban conditions.
The LDW is triggered when the vehicle is tracking and the system detects that the driver is leaving the lane unintentionally. The system measures the time or distance to the lane crossing threshold to determine when to warn the driver. This measurement is based on the outer edge of the front left/right tyre to the inner edge of the left/right lane marker.
The driver can adjust the system’s sensitivity between two levels (high or normal), or can turn the system off completely. The sensitivity of the warning system is adjusted via the Instrument Cluster (IC) menu.
When set at normal sensitivity, the system suppresses any warnings, if driver intervention is detected via the signals listed below:
- Accelerator pedal movement
- Significant steering wheel angle change
- Brake pressure
- Direction indicator activation.
When set at high sensitivity, the system will not suppress any warnings when intervention is detected, unless the appropriate direction indicator is activated.
The following limitations apply to LDW:
- The lane in use must be wider than 2.5 m (8.2 ft)
- No warning is given if the correct direction indicator is active
- Not active in off-road conditions
- Not available when the sand or mud-ruts, Terrain Response programs are selected.
The performance of the LDW system may also be affected in the following conditions:
- During adverse driving conditions, if the camera has impaired vision, for example heavy fog, rain, snow, soiled windscreen etc.
- Worn, damaged or temporary lane markings, for example road works
- Tight deviations of the roads and their gradients
- Driving towards very bright lights/lamps, in direct sunlight
- Driving very close to another vehicle
In the event of a system fault, the feature is suppressed until the fault is rectified. The driver is informed via an Instrument Cluster (IC) text message and warning symbol.
LANE KEEP ASSIST
Lane Keep Assist (LKA) continuously monitors the vehicle’s position relative to the road markings. If the vehicle drifts from the center of the lane and the system does not detect an obvious lane change maneuver or use of the direction indicators, the LKA will assist the driver to keep the vehicle in the current lane by applying steering wheel torque. The alert is reinforced by a graphical warning, displayed in the Instrument Cluster (IC) message center, which is used to inform the driver when the vehicle is tracking left or right of the lane markers.
LKA uses the Image Processing Module (IPM) and functions the same way in which Lane Departure Warning (LDW) works for lane tracking.
The LKA can be selected on or off using the LDW switch which acts as a dual switch to differentiate between the two systems. Also LKA can be selected on or off in the IC message center.
The driver can adjust the system’s sensitivity between two levels (high or normal). The sensitivity of the warning system is adjusted via the IC message center menu. The LKA system also uses the same limitations as LDW system.
The performance of the LKA system may also be affected in the following conditions:
- During adverse driving conditions, if the camera has impaired vision, for example heavy fog, rain, snow, soiled windscreen
- Worn, damaged or temporary lane markings, for example road works
- Tight deviations of the roads and their gradients
- Driving towards very bright lights/lamps, in direct sunlight
- Driving very close to another vehicle.
In the event of a system fault, the feature is suppressed until the fault is rectified. The driver is informed by a text message and warning symbol in the IC message center.
TRAFFIC SIGN RECOGNITION
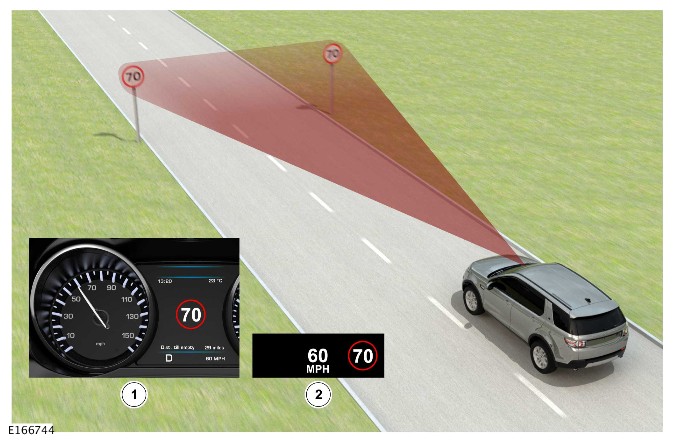
| ITEM | DESCRIPTION |
|---|---|
| 1 | Instrument Cluster (IC) |
| 2 | Head Up Display (HUD) |
Traffic Sign Recognition (TSR) captures image data of the road scene. The Image Processing Module (IPM), within the camera, infers speed limits implied and read from the scene.
The IPM also obtains information about the current road from the navigation system through the vehicle Controller Area Network (CAN) bus. This data includes the current road speed limit, road type and country.
The IPM combines the available speed limit information from both the navigation and vision systems, to provide a more accurate and consistently available speed limit value.
The speed limit value is sent, via the High Speed (HS) Controller Area Network (CAN) chassis bus, to the Instrument Cluster (IC) and Head Up Display (HUD) which displays the information to the driver.
To indicate how recent the information is, the displayed sign fades away in a series of steps as the distance increases from the location of the sign.
The driver can also use the system to provide a warning of speeding, by configuring the system to flash the speed limit sign in the display when the vehicle exceeds the displayed limit by a set amount. Speed alert can be switched on and off, or the settings can be adjusted by the driver to display three different settings:
- Vehicle speed equals the detected speed limit.
- Vehicle speed is 10 km/h (6 mph) above the detected speed limit.
- Vehicle speed is 20 km/h (10 mph) above the detected speed limit.
Rain and snow speed limits are indicated, when applicable, as are towing speed limits, when a trailer is connected to the vehicle. Speed limit information from the navigation system is displayed for roads with no sign information.
If the navigation system is not available, or the off-road navigation is selected, TSR will use the camera only, but cannot perform to full functionality.
The system can be switched on and off via the instrument cluster message center menu. The system will operate up to a maximum speed of 250 km/h (155 mph).
The performance of the TSR may also be affected in the following conditions:
- During adverse driving conditions, if the camera has impaired vision (reduced visibility, less than 1km (0.6 miles), for example heavy fog, rain, snow, soiled windscreen
- Signs are rotated greater than 15 degrees in pitch, yaw or roll, compared to the road surface
- Concealed or covered sign information
- Non-conforming road signs
- Accuracy and validity of navigation data (i.e. up to date)
- Travelling in an area not covered by the navigation system
- Driving in direct sunlight, leading to overexposure and reduction in contrast
- Vehicle not in a supported country.
In the event of a system fault, the feature is suppressed until the fault is rectified. The driver is informed via an Instrument Cluster (IC) text message and warning symbol.
-
This feature is only available on vehicles with navigation fitted.
-
Traffic Sign Recognition (TSR) is not available in markets where there is a poor or non-existent map and navigation database.
AUTONOMOUS EMERGENCY BRAKING
Autonomous Emergency Braking (AEB) can be operated by enabling and disabling the system via the Instrument Cluster (IC) menu. AEB also becomes operational when the vehicle is in the forward motion at speeds between 5 kph (3 mph) and 80 kph (50 mph).
AEB interacts with other vehicle systems for key data and functionality, relying on data communication exchanges between the following modules:
- Steering Angle Sensor Module (SASM) - Steering angle and rate of change
- Restraints Control Module (RCM) - Lateral acceleration and yaw rate
- Image Processing Module (IPM) - Collision risk detection
- Anti-lock Brake System (ABS) control module - Braking control and vehicle speed
- Powertrain Control Module (PCM) - Accelerator Pedal Position (APP) and torque control
- Head Up Display (HUD) - Warning message
- Instrument Cluster (IC) - Warning message.
This information is exchanged using the High Speed (HS) Controller Area Network (CAN) powertrain and chassis bus and will also use the Gateway Module (GWM) and HS CAN comfort bus.
AEB uses a four stage sequence of which it operates:
- Driver Warning - Before braking is engaged, an audible warning is sounded and a visual warning is displayed in the IC indicating that a collision risk has been identified, but is still avoidable by the driver. The visual warning message is also displayed in the HUD if fitted.
- Brake Precharge - If the time until collision becomes shorter, but still avoidable, the system applies a small amount of pressure on the brakes to fill the gap between the pads and discs, ensuring the best braking performance if the driver reacts to the warning.
- Collision Mitigation - Having identified a collision risk, either static or travelling in the same direction, the function will apply the brakes, mitigating the collision. The operational speed range is between 5 and 80 km/h (3mph and 50mph).
- Message on the IC Post Braking - The IC displays a message to confirm that the Intelligent Emergency Braking (IEB) function has been activated.
The AEB system will not be operational if any the following are present:
- Poor camera visibility:
- Fog, heavy precipitation, soiled windscreen
- System fault detected
- Forward collision warning velocity outside range: 30 - 80 km/h (18 - 50 mph)
- IEB velocity outside range: 5 - 80 km/h (3 - 50 mph)
- Dynamic Stability Control (DSC) is switched off
- The vehicle is cornering sharply.
DRIVER DROWSINESS DETECTION
Driver Drowsiness Detection observes the driver's techniques for signs of driver fatigue.
Driver Drowsiness Detection only becomes operational when at 50 kph (32 mph) and will not operate below this.
The Image Processing Module (IPM) hosts the Driver Drowsiness Detection feature and will communicate with Steering Angle Sensor Module (SASM) within the Clockspring (CLKSPG), Powertrain Control Module (PCM), Anti-lock Braking System (ABS) control module, Gateway Module (GWM) assembly and Instrument Cluster (IC). The IPM communicates with these modules using High Speed (HS) Controller Area Network (CAN) bus messages and Local Interconnect Network (LIN) bus.
When the Driver Drowsiness Detection is in operation, the IPM will monitor the SASM for vehicle drifting. The IPM will also monitor the brake pedal and accelerator pedal for inconsistent pedal use.
If the IPM detects signs of driver fatigue, the IPM will inform the driver by displaying a 2 stage warning message in the IC message center.

If the IPM, SASM, PCM, ABS control module, GWM assembly, clockspring or IC fails then the Driver Drowsiness Detection system becomes inactive.
BLINDSPOT MONITORING
A = HARDWIRED; U = PRIVATE BUS; AM = HIGH SPEED (HS) CAN CHASSIS BUS; AO = MEDIUM SPEED (MS) CONTROLLER AREA NETWORK (CAN) BODY BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Blindspot Monitoring Control Module (BMCM) - Left |
| 2 | Blindspot Monitoring Control Module (BMCM) - Right |
| 3 | Ground |
| 4 | Ground |
| 5 | Supply |
| 6 | Ground |
| 7 | Supply |
| 8 | Supply |
| 9 | Passenger door mirror |
| 10 | Passenger Door Module (PDM) |
| 11 | Body Control Module/Gateway Module (BCM/GWM) |
| 12 | Driver Door Module (DDM) |
| 13 | Driver door mirror |
| 14 | Anti-lock Brake System Control Module (ABS) |
| 15 | Instrument Cluster (IC) |
REVERSE TRAFFIC DETECTION
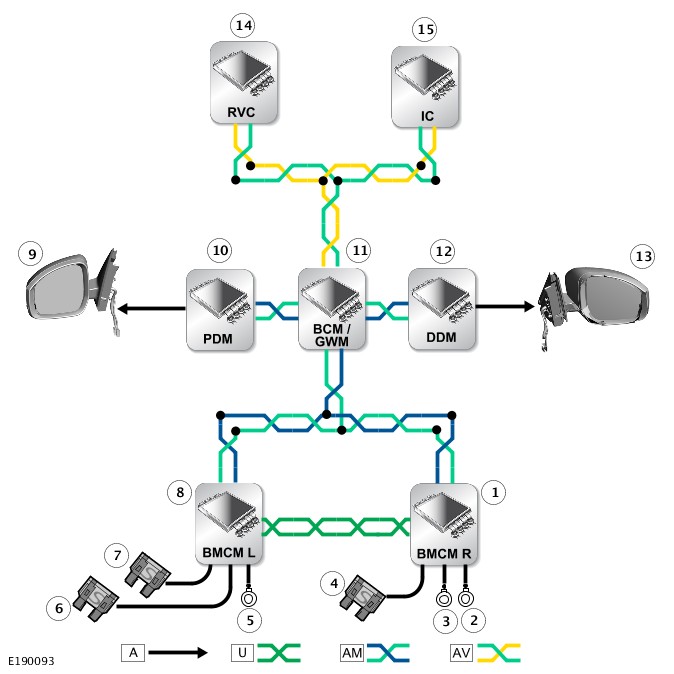
A = HARDWIRED; U = PRIVATE BUS; AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Blindspot Monitoring Control Module (BMCM) - Left |
| 2 | Blindspot Monitoring Control Module (BMCM) - Right |
| 3 | Ground |
| 4 | Ground |
| 5 | Supply |
| 6 | Ground |
| 7 | Supply |
| 8 | Supply |
| 9 | Passenger door mirror |
| 10 | Passenger Door Module (PDM) |
| 11 | Body Control Module/Gateway Module (BCM/GWM) |
| 12 | Driver Door Module (DDM) |
| 13 | Driver door mirror |
| 14 | Anti-lock Brake System Control Module (ABS) |
| 15 | Instrument Cluster (IC) |
LANE DEPARTURE WARNING
A = HARDWIRED; AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | IPM fan |
| 3 | Ground |
| 4 | Supply |
| 5 | Lane Departure Warning (LDW) switch |
| 6 | Body Control Module/Gateway Module (BCM/GWM) |
| 7 | Instrument Cluster (IC) |
| 8 | Steering Wheel Module (SWM) |
| 9 | Power Steering Control Module (PSCM) |
| 10 | Powertrain Control Module (PCM) |
| 11 | Anti-lock Brake System control module (ABS) |
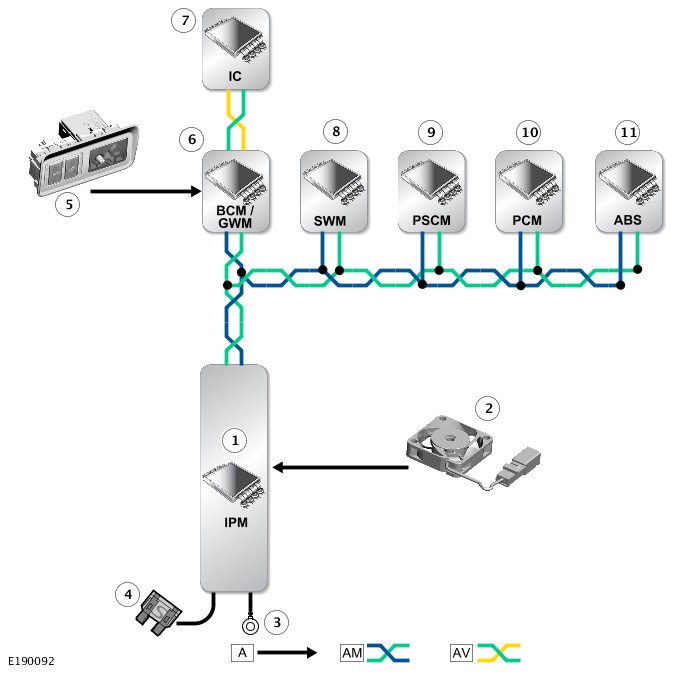
TRAFFIC SIGN RECOGNITION

A = HARDWIRED; AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | IPM fan |
| 3 | Ground |
| 4 | Supply |
| 5 | Anti-lock Brake System control module (ABS) |
| 6 | Powertrain Control Module (PCM) |
| 7 | Body Control Module/Gateway Module (BCM/GWM) |
| 8 | Instrument Cluster (IC) |
| 9 | Head up Display control module (HUDCM) |
| 10 | Infotainment Master Controller (IMC) |
AUTONOMOUS EMERGENCY BRAKING
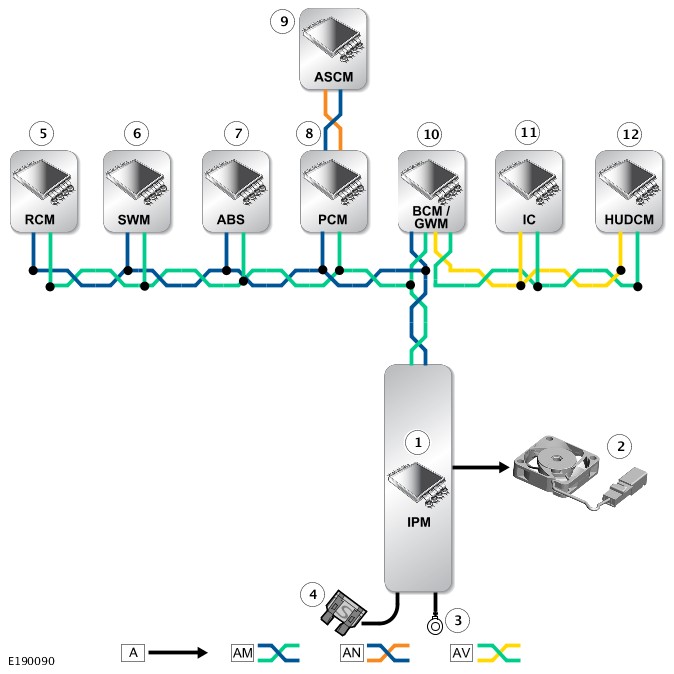
A = HARDWIRED; AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AN = HS CAN POWERTRAIN BUS; AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | IPM fan |
| 3 | Ground |
| 4 | Supply |
| 5 | Restraints Control Module (RCM) |
| 6 | Steering Wheel Module (SWM) |
| 7 | Anti-lock Brake System control module (ABS) |
| 8 | Powertrain Control Module (PCM) |
| 9 | Adaptive Speed Control Module (ASCM) |
| 10 | Body Control Module/Gateway Module (BCM/GWM) |
| 11 | Instrument Cluster (IC) |
| 12 | Head up Display control module (HUDCM) |
DRIVER DROWSINESS DETECTION
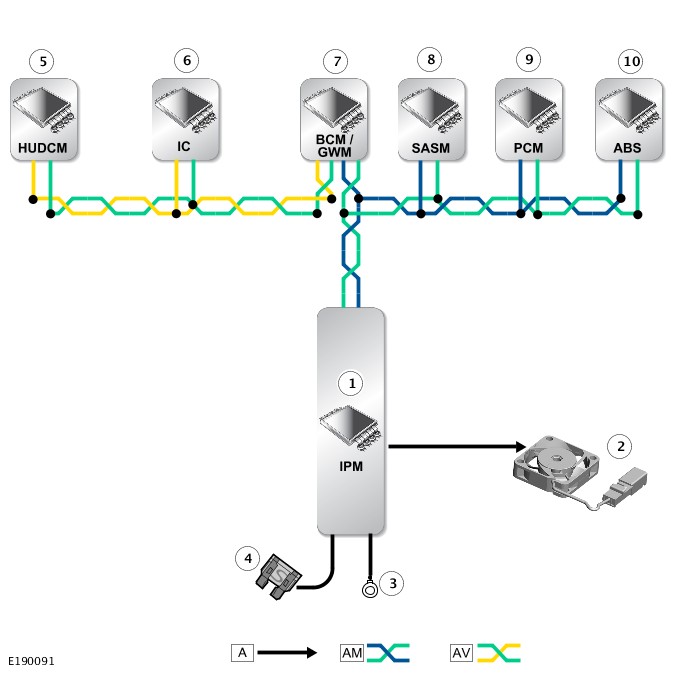
A = HARDWIRED; AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS; AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | Image Processing Module (IPM) |
| 2 | IPM fan |
| 3 | Ground |
| 4 | Supply |
| 5 | Head up Display control module (HUDCM) |
| 6 | Instrument Cluster (IC) |
| 7 | Body Control Module/Gateway Module (BCM/GWM) |
| 8 | Steering Angle Sensor Module (SASM) |
| 9 | Powertrain Control Module (PCM) |
| 10 | Anti-lock Brake System control module (ABS) |
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES (G1880419)
For a detailed description of the side obstacle detection system, refer to the relevant Description and Operation section in the workshop manual. REFER to:Warning Devices (413-09 Warning Devices, Description and Operation).
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault, and may also cause additional faults in the vehicle being tested and/or the donor vehicle.
-
If a control module or a component is suspect and the vehicle remains under manufacturer warranty, refer to the Warranty Policy and Procedures manual, or determine if any prior approval programme is in operation, prior to the installation of a new module/component.
-
When performing voltage or resistance tests, always use a digital multimeter that has the resolution ability to view 3 decimal places. For example, on the 2 volts range can measure 1mV or 2 K Ohm range can measure 1 Ohm. When testing resistance always take the resistance of the digital multimeter leads into account.
-
Check and rectify basic faults before beginning diagnostic routines involving pinpoint tests.
- Verify the customer concern
- Visually inspect for obvious signs of damage and system integrity
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step
- If the cause is not visually evident, verify the symptom and refer to the Symptom Chart, alternatively check for Diagnostic Trouble Codes (DTCs) and refer to the DTC Index
- Check JLR claims submission system for open campaigns. Refer to the corresponding bulletins and SSMs which may be valid for the specific customer complaint and carry out the recommendations as required.
| SYMPTOM | POSSIBLE CAUSES | ACTION |
|---|---|---|
| Side obstacle detection system inoperative |
|
|
| BLIND SPOT MONITORING BLOCKED message displayed in message center |
|
|
| BLIND SPOT MONITORING NOT AVAILABLE message displayed in message center |
|
NOTE:
Side obstacle detection is disabled for both sides of the vehicle when a fault has been detected.
|
| Autonomous Emergency Braking (AEB) / Lane Departure Warning/Forward Alert NOT AVAILABLE message displayed on the message center accompanied by Image Processing Module A (IPMA) DTC U3000-96 |
|
|
For a list of Diagnostic Trouble Codes (DTCs) that could be logged on this vehicle, please refer to Section 100-00. REFER to:(100-00 General Information)
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
SERVICE INDICATOR RESET (G2319823)
-
For Diesel vehicles and depending on the specification, this procedure will only reset the oil dilution counter after a service.
-
To reset the time and distance counters for these vehicles, complete the configuration step.
-
Set the ignition to the ON position.NOTE:
Make sure the Jaguar Land Rover approved diagnostic equipment is not connected to the vehicle.
- Open the hood.
- Open the drivers door.
-
Fully depress the brake pedal then the accelerator pedal and hold for 10 seconds.NOTE:
If the accelerator pedal pressed before the brake pedal this will cause Brake Over Accelerator (BOA) logic and will default the accelerator pedal to 0%. If this happens the service reset procedure will have to be restarted.
- A 'Service Reset' message will appear on the instrument cluster.
- Release the accelerator and brake pedals and set the ignition to the OFF position.
- Set the ignition to the ON position and check the message has been cleared.
- If the message remains, repeat the process.
- Using the Jaguar Land Rover approved diagnostic equipment, reset the Service Interval Indicator (SII).
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
LOW WASHER FLUID WARNING INDICATOR SWITCH (G1549861)
- 84.10.22
- SWITCH - FLOAT - LOW WASHER FLUID LEVEL - RENEW
- ALL DERIVATIVES
- 1.00
- USED WITHINS
Removal steps in this procedure may contain installation details.
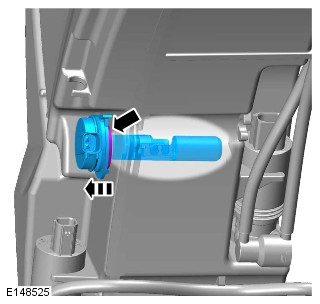
- To install, reverse the removal procedure.
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
BLIND SPOT MONITORING SENSOR LH (G1605217)
- 86.54.92
- SIDE OBSTACLE DETECTION CONTROL MODULE - EACH - RENEW
- ALL DERIVATIVES
- 1.10
- USED WITHINS
Removal steps in this procedure may contain installation details.
- Disconnect the battery ground cable.
Refer to:Specifications (414-00 Battery and Charging System - General Information, Specifications).
-
Raise and support the vehicle.WARNING:
Make sure to support the vehicle with axle stands.
-
Refer to:Rear Bumper Cover (501-19 Bumpers, Removal and Installation).
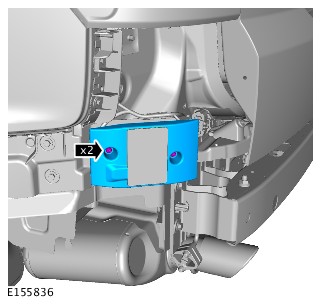
- To install, reverse the removal procedure.
- If a new component has been installed, configure both the left and right side Blindspot Monitoring Sensors using Land Rover approved diagnostic equipment.
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
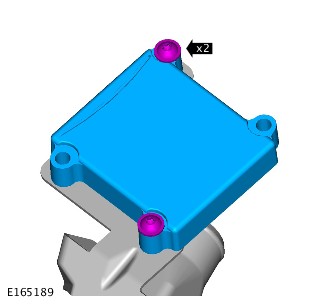
GENERAL PROXIMITY SENSOR MODULE (G1700111)
- 86.54.31
- MODULE - GENERAL PROXIMITY SENSOR (GPSM) - RENEW
- ALL DERIVATIVES
- 0.70
- USED WITHINS
-
This procedure contains some variation in the illustrations depending on the vehicle specification, but the essential information is always correct.
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
-
Refer to:C-Pillar Lower Trim Panel (501-05 Interior Trim and Ornamentation, Removal and Installation).
- To install, reverse the removal procedure.
- If a new component has been installed, configure using Land Rover approved diagnostic equipment.
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
DOOR MIRROR WADE SENSOR (G1677359)
- 86.54.32
- SENSOR - WADE - DOOR MIRROR - LEFT - RENEW
- ALL DERIVATIVES
- 0.30
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
-
LH illustration shown, RH is similar.
- To install, reverse the removal procedure.
- If a new component has been installed, configure using Land Rover approved diagnostic equipment.
2017.0 RANGE ROVER SPORT (LW), 413-09
WARNING DEVICES
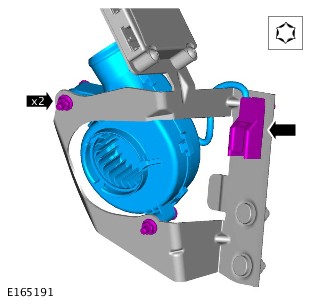
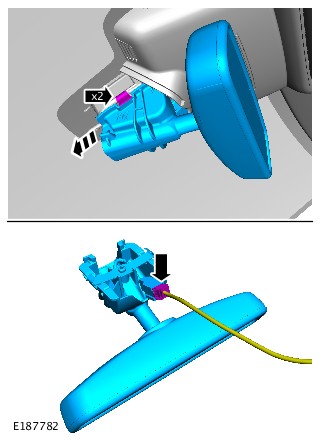
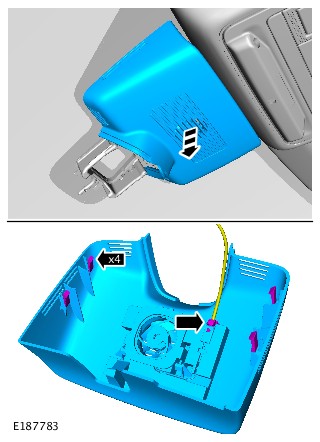
IMAGE PROCESSING MODULE (G1881161)
- 86.54.34
- MODULE - IMAGE PROCESSING CONTROL (IPCM) - RENEW
- ALL DERIVATIVES
- 0.30
- USED WITHINS
- Use a suitable trim tool.
- Care must be taken to avoid damaging the surrounding components.
- Take extra care when removing the component, prevent damage to the mating faces.
- This procedure contains some variation in the illustrations depending on the vehicle specification, but the essential information is always correct.
- This procedure contains illustrations showing certain components removed to provide extra clarity.
- Make sure the ignition is OFF before carrying out this procedure.
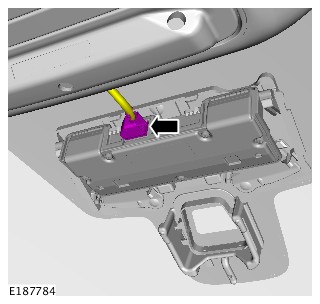
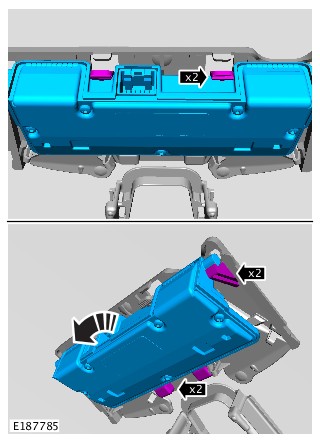
- Connect the electrical connector.
-
- Connect the electrical connector.
- Install the interior mirror upper trim.
-
- Connect the electrical connector.
- Install the interior mirror.
-
If a new IPMA is installed, the Jaguar Land Rover approved diagnostic equipment must be used to calibrate the module.NOTE:
Vehicles to the end of 16MY.
-
NOTES:
-
Vehicles from introduction of 17MY.
-
The drive cycle must not be completed in dark or foggy conditions. The vehicle must not be loaded. Use straight roads wherever possible. Do not travel closely to the vehicle in front.
- If a new IPMA is installed. The Jaguar Land Rover approved diagnostic equipment must be used to calibrate the module.
- Select 'IPMA'
- Select 'Replace ECU'
- Follow all on-screen instructions to complete this task.
-
413-13: Parking Aid
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID (G1702323)
5-door vehicles
| DESCRIPTION | NM | LB-FT | LB-IN |
|---|---|---|---|
| Parking assist control module bolts | 10 | 7 | - |
| Camera control module bolts | 10 | 7 | - |
| Mirror proximity camera screws | 0.5 | - | 4 |
3-door vehicles
| DESCRIPTION | NM | LB-FT | LB-IN |
|---|---|---|---|
| Parking assist control module bolts | 10 | 7 | - |
| Camera control module bolt | 9 | - | 80 |
| Camera control module nut | 9 | - | 80 |
| Mirror proximity camera screws | 0.5 | - | 4 |
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID (G1950058)
Right Hand Drive (RHD) vehicle is shown. The Left Hand Drive (LHD) vehicle is similar.
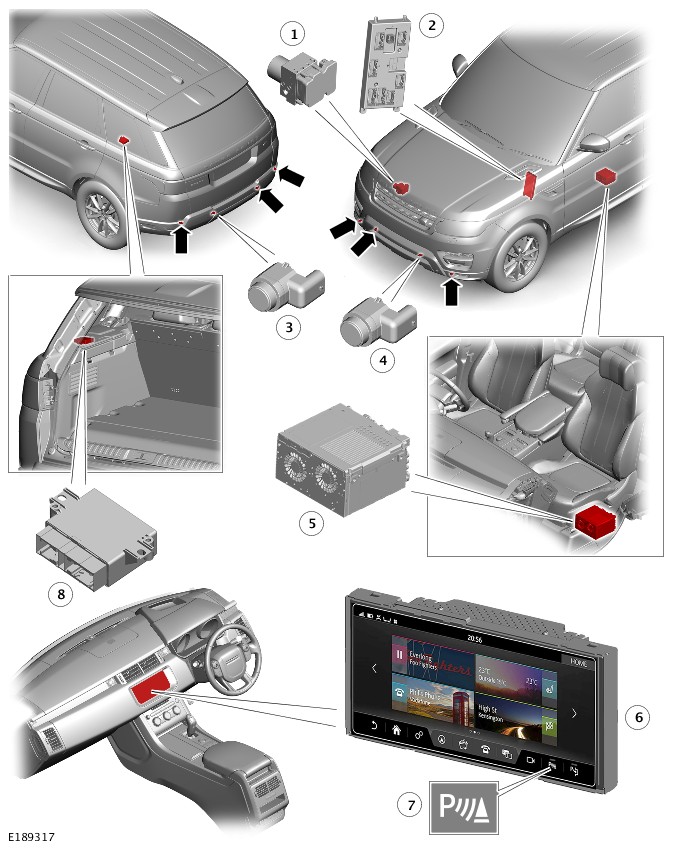
| ITEM | DESCRIPTION |
|---|---|
| 1 | Anti-Lock Brake System Control Module (ABS) |
| 2 | Body Control Module/Gateway Module (BCM/GWM) |
| 3 | Park Aid Sensors - Rear (4 off) |
| 4 | Park Aid Sensors - Front (4 off) |
| 5 | Infotainment Master Controller (IMC) |
| 6 | Touch Screen (TS) |
| 7 | Parking Aid soft key |
| 8 | Parking Assist Control Module (PACM) |
PARK ASSIST
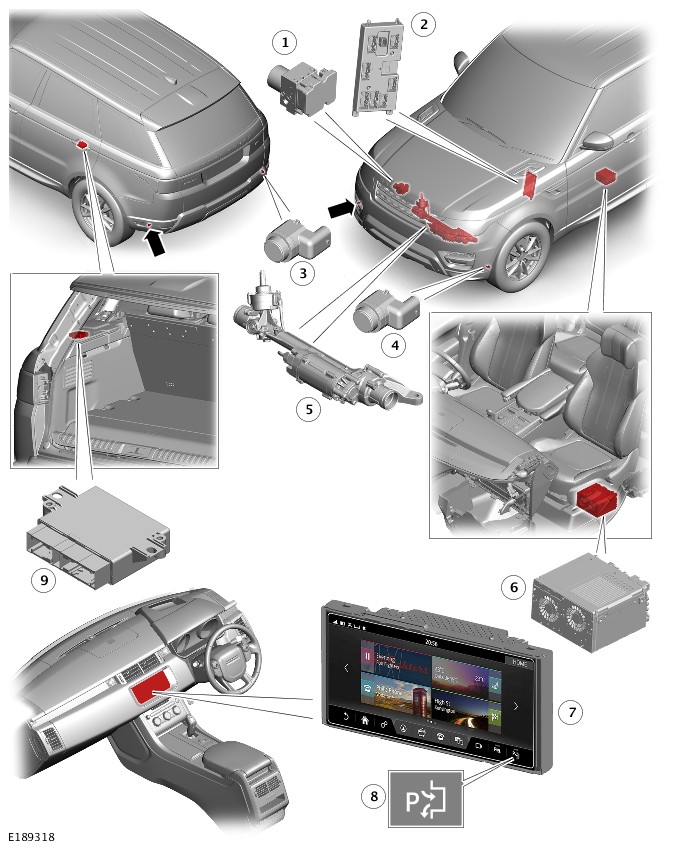
| ITEM | DESCRIPTION |
|---|---|
| 1 | Anti-Lock Brake System Control Module (ABS) |
| 2 | Body Control Module/Gateway Module (BCM/GWM) |
| 3 | Park Assist Sensor - Rear (2 off) |
| 4 | Park Assist Sensor - Front (2 off) |
| 5 | Power Steering Control Module (PSCM) |
| 6 | Infotainment Master Controller (IMC) |
| 7 | Touch Screen (TS) |
| 8 | Park Assist soft key |
| 9 | Parking Assist Control Module (PACM) |
REAR VIEW CAMERA
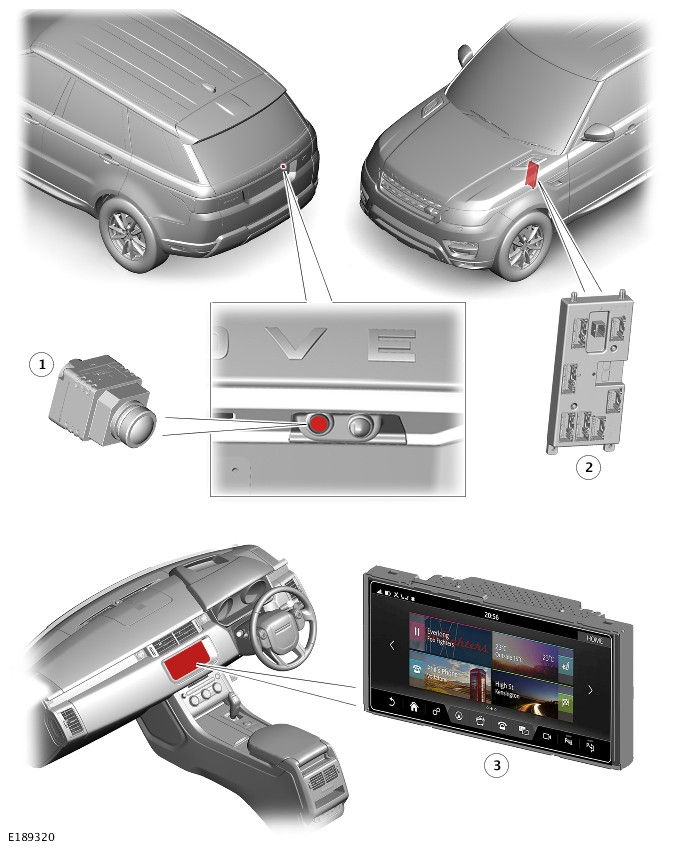
| ITEM | DESCRIPTION |
|---|---|
| 1 | Rear View Camera (RVC) |
| 2 | Body Control Module/Gateway Module (BCM/GWM) |
| 3 | Touch Screen (TS) |
PROXIMITY CAMERA SYSTEM
| ITEM | DESCRIPTION |
|---|---|
| 1 | Door mirror camera - Right |
| 2 | Door mirror camera - Left |
| 3 | Body Control Module/Gateway Module (BCM/GWM) |
| 4 | Camera Control Module (CCM) |
| 5 | Proximity camera soft key |
| 6 | Rear camera |
| 7 | Front camera |
WADE SENSING SYSTEM
| ITEM | DESCRIPTION |
|---|---|
| 1 | Door mirror wade sensor - Right |
| 2 | Door mirror wade sensor - Left |
| 3 | Body Control Module/Gateway Module (BCM/GWM) |
| 4 | Instrument Cluster (IC) |
| 5 | Touch Screen (TS) |
| 6 | General Proximity Sensor Module (GPSM) |
PARKING AID
The parking aid system provides an audible warning to the driver when any obstacles are in the path of the vehicle during forward or reverse parking maneuvers.
The system consists off:
- Parking Assist Control Module (PACM)
- Parking aid switch
- Four ultrasonic sensors in the front bumper
- Four ultrasonic sensors in the rear bumper
- Four ultrasonic sensors in the flank of the vehicle (two on the sides of the front bumper and two of the rear (If flank guard is fitted))
During low speeds, the PACM uses the ultrasonic sensors to monitor the area around the vehicle. If an object is detected within a monitored area, the module then outputs a warning using the audio system speakers. A threat is classified as an obstacle inside the driving tube of the vehicle to which the vehicle either drives to or has intent to (for example, an object in front and the vehicle in Drive (D)). The sensors can detect solid objects such as posts, walls and other vehicles. Objects very close to the ground may not be detected, but because of their low height may not cause damage to the vehicle.
When the system is activated the corresponding park aid tale-tell will highlight. It is only going to report graphical and audible warnings if a threat is identified at which point all the detected obstacles can be observed.
When the graphical feedback is displayed:
- Threats are displayed with coloured graphics accompanied by audible beeps.
- Non threats (rest of the detected objects) are displayed by a gray bar.
The system classifies the objects into sectors (as seen in the park aid plan view) and reports the closest one for that sector.
When washing the vehicle do not aim high pressure water jets directly at the sensors. Do not use abrasive materials or hard/sharp objects to clean the sensors. Only use approved vehicle cleaning products.
PARK ASSIST
Park assist is a supplement to, and not a replacement for, good observation and a safe driving style. It is the driver's responsibility at all times, to make sure the manoeuvers are carried out safely.
Park assist is an aid to manoeuvering the vehicle in and out of parking spaces and into parking bays.
The park assist system operates using the four side sensors; two sensors mounted on each side of the front and rear bumpers, together with front and rear parking aid sensors.
The system consists of three different options:
- Parallel Parking: Will identify a suitably sized parking space in a line of parked vehicles and then parallel park the vehicle.
- Perpendicular Parking: Will identify a suitably sized parking bay in a row of parked vehicles and then reverse park the vehicle. If the space is too small to allow the doors to open the system will not report it.
- Park Out: Will aid manoeuvering of the vehicle from out of a parallel parking space where other vehicles are parked behind or in front of the vehicle, or both.
REVERSE TRAFFIC DETECTION
The Reverse Traffic Detection (RTD) system provides a warning to the driver of any moving vehicle, at either side that may cause an accident during a reversing manoeuver. To avoid this, the system is able to use the following warning modes to inform the driver, when the vehicle is in a reversing manoeuver:
- An amber warning icon, which flashes in the relevant exterior mirror, and warning tones via the audio system.
- The rear camera screen
- The parking aid screen is shown on the Touch Screen (TS), with the warning icon on the relevant side.
The RTD function is a part of the blind spot monitoring system. For additional information, refer to:Blind Spot Monitoring System (413-09 Warning Devices, Description and Operation).
WADE SENSING SYSTEM
The wade sensing system feature provides intuitive information of the vehicles capability during wading through water. The purpose is to assist the average driver whilst driving through water, particularly when the visibility is poor.
The General Proximity Sensor Module (GPSM) hosts software to deliver the wade sensing functionality using two downward facing ultrasonic sensors mounted in the door mirrors. The sensors are connected to the GPSM and measure the reflection from the water surface to calculate the depth of the water through which the vehicle is travelling.
CAMERA SYSTEMS
It remains the driver's responsibility to detect obstacles and estimate the vehicle's distance from them when reversing.
Rear View Camera
The Rear View Camera (RVC) provides additional information to the driver when reversing the vehicle. When reverse gear is selected, the RVC automatically displays a wide-angle color image of the view from the rear of the vehicle onto the Touch Screen (TS). The RVC system is also supported by various driving-aid features where graphical information and warnings are superimposed onto the images displayed on the TS.
Proximity Camera
The proximity camera system provides the driver with a visual-aid when manoeuvering the vehicle at low speeds. The system uses a Camera Control Module (CCM) to capture the camera data and display the resulting images on the Touch Screen (TS). This provides the driver with a 360° view around the vehicle. The proximity camera system is also supported by various driving-aid features where graphical information and warnings are superimposed onto the images displayed on the TS.
PARKING ASSIST CONTROL MODULE
The Parking Assist Control Module (PACM) is located in the luggage compartment, behind the left quarter trim panel of the luggage compartment.
The PACM has two connectors which provide power, ground and High Speed (HS) Controller Area Network (CAN) chassis bus connections, front parking aid sensors and rear parking aid sensors.
The HS CAN chassis bus connections provide for the receipt of the following information from other systems:
- Anti-lock Brake System Control Module (ABS) - Road Speed Signal
- Transmission Control Module (TCM) - Reverse Gear Engaged Signal
The PACM also outputs messages on the HS CAN chassis bus. The Body Control Module/Gateway Module (BCM/GWM) processes these messages and converts them into HS CAN comfort messages, which are sent to the Touch screen (TS).
PARKING AID SWITCH

The parking aid switch is a soft key on the Touch Screen (TS).
The parking aid switch is allows the driver to select the parking aid system on or off.
The parking aid system will remain off until reverse gear is selected, or the system is manually switched back on again. There is a tell tale light in the switch to indicate if the system is active.
The vehicle is equipped with automatic Park Aid activation which can be configured trough the Park Aid settings to ON or OFF state. To access the settings press the gear icon on the park aid plan view.
PARK ASSIST SWITCH

| ITEM | DESCRIPTION |
|---|---|
| 1 | Park Assist Switch Indicator |
| 2 | Park Assist Soft Key |
The park assist switch is a soft key on the Touch Screen (TS).
A press on the park assist switch will bring up a menu with all the available parking modes and an option to turn off the function. Upon system activation Parallel parking will be offered by default.
GENERAL PROXIMITY SENSOR MODULE
The General Proximity Sensor Module (GPSM) has one connector which provides for power, ground and High Speed (HS) Controller Area Network (CAN) chassis bus connections, and the sensors in the door mirrors. Only one of the connectors is used.
The GPSM is able to transmit and receive the following information on the HS CAN chassis bus:
- +/- offset from the Integrated Suspension Control Module (ISCM).
- Water depth to the Touch Screen (TS) and Instrument Cluster (IC), via the Body Control Module/Gateway Module (BCM/GWM).
The GPSM has a diagnostic connection via the HS CAN chassis bus to enable faults to be retrieved using approved diagnostic equipment. Additionally an on-board diagnostic routine within the GPSM constantly monitors the system and alerts the driver to a system fault by emitting a 3 second continuous tone through the front audio speakers when in Power Mode 6 or 7.
CAMERA CONTROL MODULE

The Camera Control Module (CCM) has the following connections:
- High Speed (HS) Controller Area Network (CAN) comfort network
- Four camera inputs
- Video signal output to the Infotainment Master Controller (IMC)
- Power supply and ground.
The CCM gathers the camera images and analyses and alters them by adjusting perspectives and applying corrections. The resulting processed images are then relayed to the Touch Screen (TS) via a Low-Voltage Differential Signal g (LVDS) .
The CCM also adds guidance and warning overlays to the camera images to create the various driving-aid features supported by the camera proximity system, for example, visual direction is made available when reversing the vehicle.
In addition to the data lines, the camera receives a power supply and a ground from the CCM.
Care must be taken when routing, disconnecting and reconnecting the camera harnesses.
CAMERAS
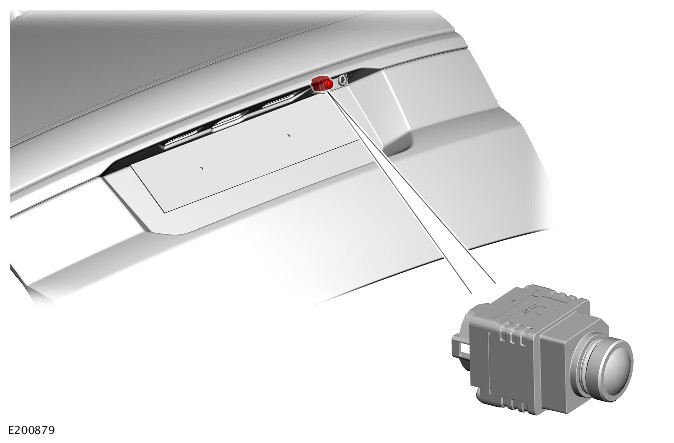
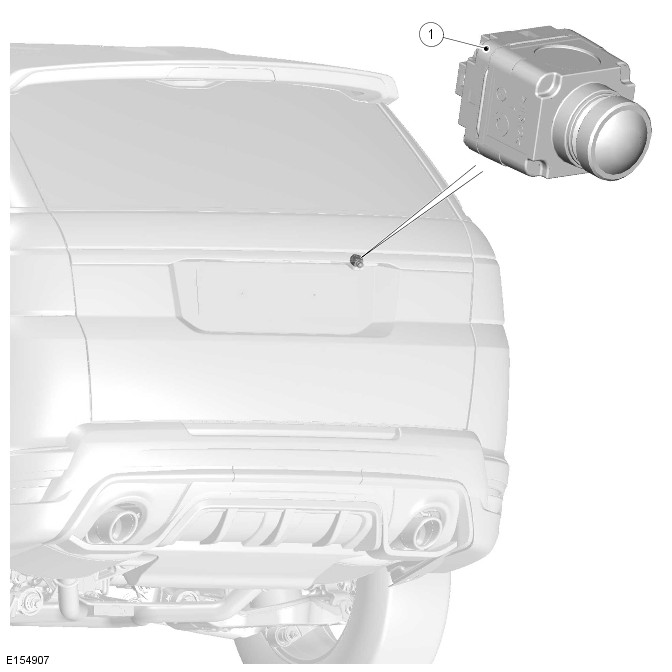
| ITEM | DESCRIPTION |
|---|---|
| 1 | Proximity Camera |
The camera system uses Video Graphic Array (VGA) resolution cameras which are permanently powered whenever the vehicle is in Power Mode 6 or 7. Depending on vehicle specification, either one or five cameras will be used.
On the Rear View Camera (RVC), the camera is fitted in the tailgate, next to the exterior handle.
On the proximity camera system, you will find a camera mounted in the front bumper, one mounted in each door mirror and one mounted in the tailgate.
The camera provides an image covering a zone approximately 130° wide by 112° deep and is capable of capturing approximately thirty frames per second.
CAMERA MOUNTING
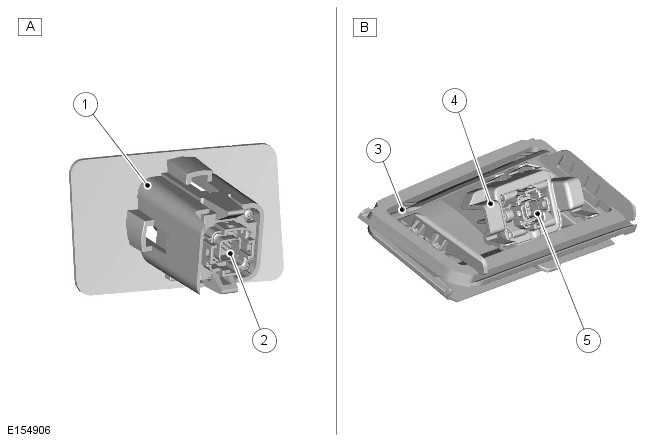
| ITEM | DESCRIPTION |
|---|---|
| A | Front View Camera Mounting |
| B | Rear View Camera Mounting (Proximity Camera Shown) |
| 1 | Front View Camera Bracket in Bumper |
| 2 | Front View Camera |
| 3 | Exterior Tailgate Handle Bezel |
| 4 | Rear View Camera Bracket |
| 5 | Rear View Camera (RVC) |
To reduce the cost of accident repair the mounting of the front bumper cameras feature a 'snap free' bracket. On impact, the bracket will release the camera preventing damage to the camera itself. Depending on the severity of the accident it may also be possible to reuse the brackets as they are manufactured from a memory type plastic.
The positioning accuracy of all the cameras is crucial for the successful operation of the proximity camera system. The camera housings are manufactured using metal to maintain a structural stability in high-ambient temperatures. Without this stability a loss of image focus would be a possibility, therefore care must be taken when mounting the cameras in ensuring they sit correctly into their locations. Secure mounting of the cameras provides an initial 'build up' tolerance accurate to 2 mm. In the event of camera replacement, a calibration routine must be performed.
PARKING AID AND PARKING AID (SYSTEM) - 360°
The Parking Aid and Parking Aid (system) - 360° is automatically activated when:
- Reverse (R) gear is selected
- Neutral (N) gear is selected.
While the system is active and a forward gear is selected, the sensors remain active. When the vehicle speed reaches 16 km/h (10 mph) the system will disable.
The Parking Aid and Parking Aid (system) - 360° can be configured to activate automatically when:
- The vehicle speed drops below 10 km/h (6 mph)
- Drive (D) gear is selected.
Automatic Park Aid activation can be configured trough the Park Aid settings to ON or OFF state. To access the settings press the gear icon on the park aid plan view. There you will find Automatic Front Parking Aid. The selection will be retained in all Power Modes.
The Parking Aid and Parking Aid (system) - 360° will not be available under the following conditions:
- Vehicle speed is greater than 16 km/h (10 mph)
- The selected gear is Park (P)
- If wade sensing is active (if fitted)
- When there is a system fault.
Parking Aid and Parking Aid (system) - 360° may be selected ON or OFF by pressing the Parking Aid switch. A tell tale in the switch indicates if the system is active.
Audible Warnings
The control module processes the distance readings from the ultrasonic parking aid sensors to determine if there are any objects within the detection areas. If there are no objects there will be no audible warning. If an object is detected, repeated audible warnings are emitted via the audio system speakers. The time delay between the audible warnings decreases as the distance between the detected object and the vehicle decreases until eventually a continuous tone is emitted from the audio system speakers.
Distance Calculation for Audible Warnings
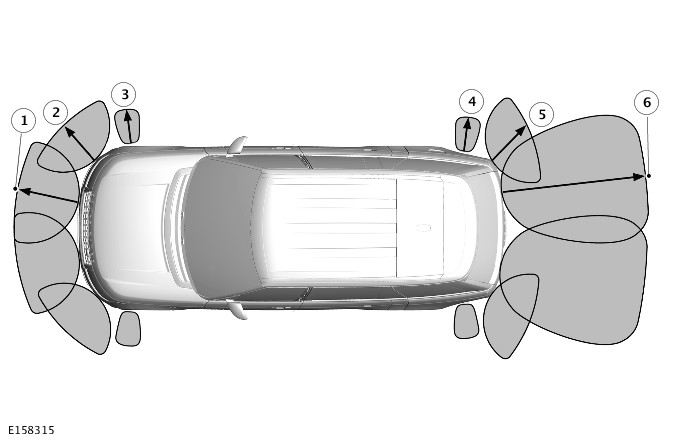
| FRONT INNER | SENSOR LOCATION | MAXIMUM DETECTION RANGE AUDIO TONE | CONTINUOUS AUDIO TONE |
|---|---|---|---|
| 1 | Front Inner | Approximately 1200 mm (47 inches) | Approximately 300 mm (12 inches) |
| 2 | Front Outer | Approximately 1200 mm (47 inches) | Approximately 300 mm (12 inches) |
| 3 | Front Side | Approximately 1200 mm (47 inches) | Approximately 300 mm (12 inches) |
| 4 | Rear Side | Approximately 1200 mm (47 inches) | Approximately 300 mm (12 inches) |
| 5 | Rear Outer | Approximately 1200 mm (47 inches) | Approximately 300 mm (12 inches) |
| 6 | Rear Inner | Approximately 1800 mm (71 inches) | Approximately 300 mm (12 inches) |
Detection Calculation
In the combined mode, the sensors emit a series of ultrasonic impulses and then switch to receiver mode to receive the echo reflected by an obstacle within the detection range. The received echo signals are amplified and converted from an analogue signal to a digital signal by the sensor. The module receives this data via the signal line from the sensor and calculates the distance from the object using the elapsed time between the transmitted and received impulse. The duration of the impulse duration is determined by the module, with the sensor controlling the frequency of the impulse output.
When in reverse gear, both the front and rear sensors are active, when in a forward gear, only the front sensors are active.
In receiver mode, the sensor receives impulses that were emitted by adjacent sensors. The PACM uses this information to precisely determine the position and distance of the object.
If no objects are detected there are no further warning tones. If an object is detected, repeated audible tones are emitted from either the front or rear audio speakers as appropriate. The time delay between the tones decreases as the distance between the object and the vehicle decreases, until at approximately 300 mm (12 inches), the audible tone becomes continuous.
When approaching several objects within detection range, the PACM recognizes the distance from the vehicle to the nearest object.
The PACM uses the threat based concept. An object is identified as threat if it lies in the vehicle trajectory and the vehicle is either moving towards it or has the intent to move towards it. The intent is determined by the gear.
The volume output of the parking aid audible tones can be adjusted using the audio volume control when the parking aid system is activated.
The volume can only be adjusted when the Park Aid feature is active.
The PACM receives a signal on the High Speed (HS) Controller Area Network (CAN) chassis bus when a trailer is fitted. When this signal is detected, the PACM suspends operation of the rear parking aid system. The ignition needs to be cycled once the trailer has been disconnected to activate the rear parking aid system.
Diagnostics
If the on-board diagnostic system identify a fail, the following warnings will be apply:
- The Instrument Cluster (IC) displays an error message.
- A Diagnostic Trouble Code (DTC) is logged in the Parking Assist Control Module (PACM).
The PACM has a diagnostic connection via the HS CAN chassis bus to enable faults to be retrieved using approved diagnostic equipment.
PARK ASSIST
Park assist is an aid to manoeuvering the vehicle in and out of parking spaces and parking bays. Once the system has identified a parking space using its ultrasonic sensors, it automatically steers the vehicle into place, the driver continues to brake, accelerate and select the correct gear. Informative graphics and messages are displayed in the Instrument Cluster (IC) message center, to guide the driver through each stage of the manoeuver.
Vehicles with park assist have a separate switch to activate the system.
Park assist solely uses ultrasound sensors:
- Four sensors in the front bumper (parking aid sensors).
- Two further sensors positioned on either side at the front of the vehicle to detect available spaces.
- Four sensors in the rear bumper (parking aid sensors).
- Two further sensors on the outer sides of the rear bumper.
The park assist sensors are hardwired connected to the Parking Assist Control Module (PACM). Scanned information is constantly transmitted to the PACM.
The Park Assist is automatically scanning for spaces on both sides when the vehicle is moving forward at speeds less than 30 km/h (18 mph). Scanning occurs even if Park Assist has not been selected. If Park Assist is operated and a space has been passed on the side selected, that space will be offered.
The park assist system is not available if:
- Vehicle speed is greater than 30 km/h (18 mph)
- All Terrain Progress Control (ATPC) is active (if fitted)
- Wade sensing is active (if fitted)
- Reverse (R) gear is selected
- Off-Road suspension height is selected
- A trailer is connected
- There is a system fault
Park assist is a driving aid only. It remains the driver's responsibility to drive with due care and attention during parking manoeuvers.
-
Park assist sensors may not detect some obstructions, e.g. narrow posts, small objects close to the ground, mesh fences and, in some circumstances, bicycles or motor cycles parked alongside the kerb.
-
All sensors must be kept clean and free from debris or obstructions, e.g., leaves, mud, snow, ice, frost or insects. Failure to keep the sensors clean may result in sensor miscalculation or false indications.
Park assist must not be used if:
- A temporary spare wheel is in use.
- A sensor is damaged or the bumper is damaged sufficiently to affect a sensor mounting point.
- A sensor is obstructed by items attached to the vehicle, for example bumper covers, a bicycle rack, a trailer, stickers.
- The vehicle is being used to transport a load that extends beyond the vehicle perimeter, for example a trailer.
Once a parking space has been identified, the Parking Assist Control Module (PACM) calculates the parking trajectory, communicating output information to the following vehicle systems:
- The Power Steering Control Module (PSCM) via High Speed (HS) Controller Area Network (CAN) chassis bus. The trajectory calculations are processed by the PSCM ready for the first stage of the parking manoeuver. Once a vehicle speed signal is received (vehicle reversing) the PSCM independently controls the steering trajectory.
- The IC message center by HS CAN chassis and powertrain bus, via the Body Control Module/Gateway Module (BCM/GWM). The message center displays the relevant park assist information/instructions to the driver.
- The front and rear parking aid sensor information are transmitted from the PACM to the TS. Audible warning tones are emitted through the audio system speakers.
During any park assist manoeuver, the parking aid system will remain active and will sound when objects are detected near the vehicle. A parking manoeuver can be cancelled at any point by holding/turning the steering wheel or by pressing the park assist switch.
Service Information
If the on-board diagnostic system identifies a fault, the following warnings will apply:
- The Instrument Cluster (IC) displays an error message.
- A Diagnostic Trouble Code (DTC) is logged in the Parking Assist Control Module (PACM).
Searching For Parking Space
Once the driver has identified a possible parking space the park assist system carries out the following checks and procedures:
- The system constantly searches for a space on the passenger side of the vehicle. Space on the driver's side is searched via instruction from direction indicator operation. The park assist display appears in the message center and shows the 'Searching' message and graphic. For park assist to search effectively, maintain a distance of 0.5 to 1.5 meters (1.6 to 4.9 feet) between the vehicle and the line of parked vehicles/obstacles in which you want to park.
- As the vehicle moves forward, parallel to a row of parked vehicles, it detects the parked vehicles.
- The system can detect a space up to four meters away from the side of vehicle. The system will only select a space which is 1.2 times the length of the vehicle (or greater) and deep enough to park the vehicle.
- When the vehicle detects a sufficient size parking space, the driver is instructed to stop the vehicle and select reverse gear.
- The system calculates the appropriate trajectory to park the vehicle into the detected space.
Make a visual check before starting the reversing manoeuver to make sure the space has not changed in any way.
If the driver is in slow moving traffic the system will be activated frequently when passing by other vehicles.
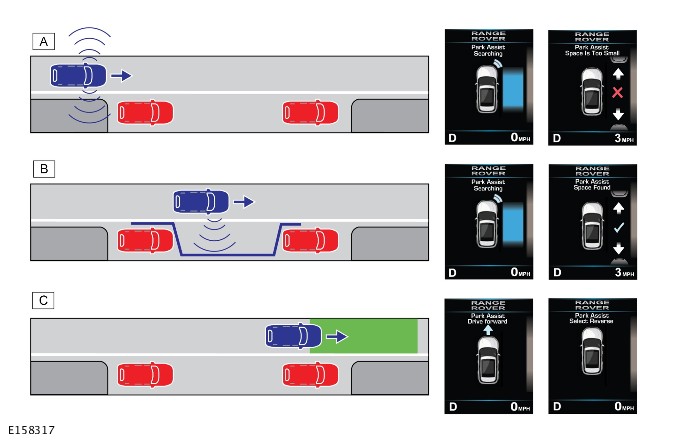
| ITEM | DESCRIPTION |
|---|---|
| A | Park Assist System Activated Searching for Space. |
| B | Park Assist Detects and Measures Space. |
| C | Vehicle Comes to End of Space and Stops Ready for Next State. |
Reversing Into Space
When reverse gear is selected the Instrument Cluster (IC) message center displays the appropriate parking instructions. Park assist will then take control of the vehicle's steering system and the steering wheel must be released. Release the foot brake carefully to move the vehicle slowly into the parking space.
-
The driver must maintain full control of the accelerator and brakes throughout the manoeuver.
-
Do not move the vehicle until the 'Parallel Parking. Reverse with care' message is displayed.
-
If the steering wheel is manually turned while park assist has control of the steering, Park assist will deactivate and the park assist switch indicator will extinguish.
-
If the vehicle's speed exceeds 5 km/h (3 mph) during the parking manoeuver, Park assist will display a message until the vehicle's speed decreases to less than 5 km/h (3 mph). If the vehicle's speed exceeds 7 km/h (4 mph), Park assist will deactivate.
The following checks and procedures are applied:
- The driver follows message center instructions, moving the vehicle backwards along the trajectory calculated by the park assist system
- Detected obstacles at 0.9 m (3 feet) generate an intermittent sound tone over the vehicle rear speakers.
- Detected obstacles at 0.3 m (1 foot) generate a constant sound tone over the vehicle rear speakers.
- On reaching the end of the reversing manoeuver the driver is instructed to apply the foot brake to stop the vehicle.
- The driver selects a forward gear to prepare for the next stage of the parking manoeuver.
- If the vehicle has been parked in a large space the manoeuver is complete and the system operation ends.
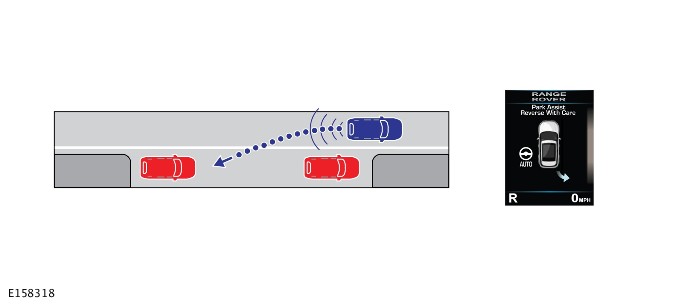
Correction Within Parking Space
If the vehicle is not in the correct position after the initial reversing manoeuver, the driver is instructed to select a forward gear with the 'Stop! Select D and await next instruction' or 'Stop! Select R and await next instruction' messages. When the adequate gear is selected, the IC message center displays the appropriate parking instructions.
The following checks and procedures are applied:
- The driver follows message center instructions, moving the vehicle forwards along the trajectory calculated by the park assist system.
- Detected obstacles at 0.4m (1.3 feet) generate an intermittent sound tone over the vehicle front speakers.
- Detected obstacles at 0.3m (1 foot) generate a constant sound tone over the vehicle front speakers.
- On reaching the end of the forward manoeuver the driver is instructed to apply the foot brake to stop the vehicle.
- The driver selects reverse gear to prepare for the next stage of the parking manoeuver.
- If the vehicle is in the final position the manoeuver is complete and the system operation ends.
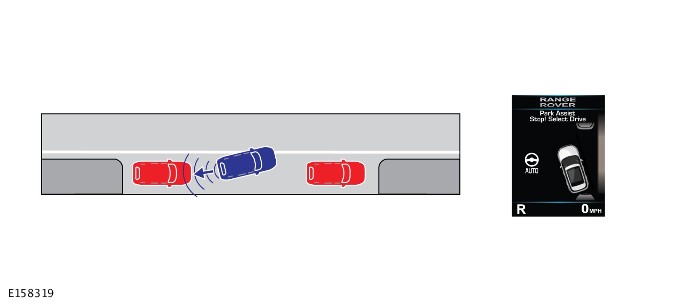
If the vehicle is parking in a smaller space more shuffling may be required to complete the parking manoeuver.
Driver selects forward gear - further shuffling is completed.
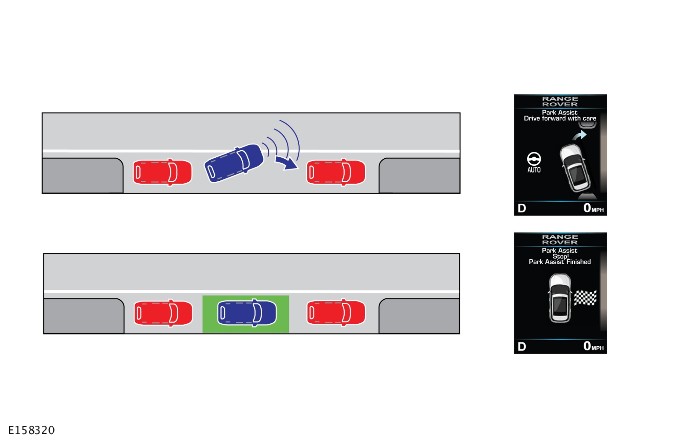
When the parking manoeuver is complete, the 'Stop! Park Assist finished' message will be displayed on the message center.
Park Out
Park out is an aid to manoeuvering out of tight parallel parking spaces. For the system to operate correctly, the vehicle must be parked in a space where other vehicles (or objects) are parked in front of or behind the vehicle, or both.
Make a visual check before starting the manoeuver to make sure the parking space has not changed in any way. For example, a pedestrian has stepped into the parking space.
-
If the vehicle's speed exceeds 6 km/h (4 mph) during the manoeuver, Park out will display a SLOW DOWN! message until the vehicle's speed decreases to less than 6 km/h (4 mph). If the vehicle's speed is not reduced, Park out will deactivate.
-
If the steering wheel is manually adjusted while park out has control of the steering system, Park out will deactivate.
-
The system is not able to distinguish between a parallel and perpendicular space. It will try to leave a perpendicular space as if it is a parallel space. Park out should not be used in a perpendicular space.
To apply the park out function the following steps and procedures will be executed by the driver and the park assist system:
- To activate, repeatedly press the Park assist switch and select the Park Exit option
- When first activated, Park out searches for an exit on the driver side of the vehicle. To search for an exit on the passenger's side, signal a turn in that direction.
- The 'Parking Exit' display appears in the message center and will display the relevant 'Enough space to exit' message and graphic.
- The message center will now show the 'Release wheel, measuring'... message and graphic.
- An instruction to 'Select R and await next instruction' will appear in the message center.
- Park out will then take control of the vehicle's steering system and the steering wheel must be released. 'Reverse With Care' will appear in the message center. Release the foot brake carefully to manoeuver the vehicle slowly out of the parking space. Follow the instructions displayed in the message center. The driver must maintain full control of the accelerator and brakes throughout the manoeuver.
- If further manoeuvering is required to exit the parking space, follow the instructions, 'Stop! Select D and await next instruction' or 'Stop! Select R and await next instruction' displayed in the message center.
- When the manoeuver is completed, the instruction message 'Stop and Take Wheel Park Assist Finished' will be displayed in the message center.
REVERSE TRAFFIC DETECTION
The Reverse Traffic Detection (RTD) system is a supplement to, not a replacement for, safe driving, good observation and use of the exterior and rear-view mirrors.
RTD is automatically disabled when a trailer is connected and when park assist is active.
The Reverse Traffic Detection (RTD) can be enabled or disabled via the Instrument Cluster (IC) menu. When RTD is disabled, an amber dot (2) will be displayed in both door mirrors.
Since the RTD function is a part of the parking aid system, it is available up to 16 km/h (10 mph).
The RTD system will automatically disable if any of the sensors become partially or completely obscured. Additionally, the amber warning indicator dot will illuminate on the exterior mirrors, and the 'Reverse Traffic Sensor Blocked' message will appear on the IC message center.
If a fault with a radar sensor is detected, an amber warning indicator dot will illuminate in the exterior mirrors and the message 'Reverse Traffic Detection System Not Available' is displayed in the IC message center.
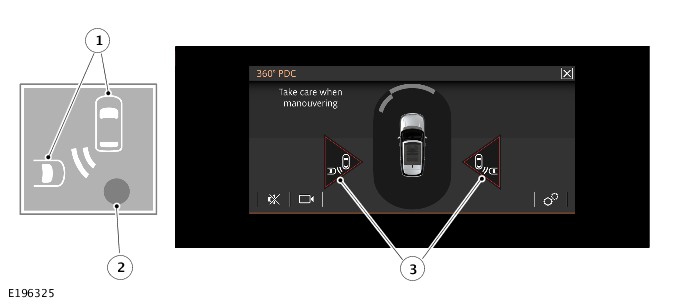
| ITEM | DESCRIPTION |
|---|---|
| 1 | Amber Warning Icon on Exterior Mirror |
| 2 | Reverse Traffic Detection Dot Icon (system is unavailable) |
| 3 | Rear Camera Screen with Icon on Touch Screen (TS) |
Even if the detected fault only affects the radar sensor on 1 side of the vehicle, the whole system is disabled. If the fault is temporary, the system will operate correctly once the engine has been switched off and then on again.
WADE SENSING SYSTEM
The General Proximity Sensor Module (GPSM) incorporates software, which is able to provide the wade sensing functionality. Two ultrasonic sensor are located on the underside of the door mirrors. The ultrasonic sensors are hardwired to the GPSM. The GPSM supplies the sensors with an ignition power and an earth lead connection. The sensors give a signal voltage, which is proportional to the measured reflection from the water. The water depth calculation is based on the reflection from the water surface, which is measured by the sensors, and:
- +/- offset from suspension height adjustment from the Integrated Suspension Control Module (ISCM) via the High Speed (HS) Controller Area Network (CAN) chassis bus.
- +/- depth effect of road gradient.
The sensors and the area below the sensors must be kept clean and free from snow, ice, mud and other debris. Failure to keep the sensors clean may result in sensor miscalculation.
- If the door mirrors are in the fold position, Wade sensing will operate but will give false readings.
- The door mirrors must be in the normal (unfolded) position when using the wade sensing system.
Wade sensing will need to be calibrated if the vehicle is fitted with Deployable side steps, Fixed side steps, or Side tubes.
These inputs are used to provide the driver audible and visual information about the depth of water and the gradient of the vehicle as compared to the water level, when the vehicle is moving through the water. The wade sensing system can display the water depth information on the Instrument Cluster (IC) virtual display and on the Touch Screen (TS). Since the GPSM is connected to the High Speed (HS) Controller Area Network (CAN) chassis bus, the water depth information is transmitted via the Body Control Module/Gateway Module (BCM/GWM).
When using the wade sensing feature, the driver is advised not to wade through flowing or rough water.
- The wade sensing system cannot detect the true level of water if a layer of ice or snow exists on the water surface.
- The wade sensing system should not be used during off-road driving, as rapid increases in water depth cannot be detected in time to deliver a warning message to the driver.
The wade sensing screen can be selected from the TS '4X4' or 'Extra Features' menus.
The TS is able to display the current and maximum water depths. The system will warn the driver as the maximum depth for wading approaches.
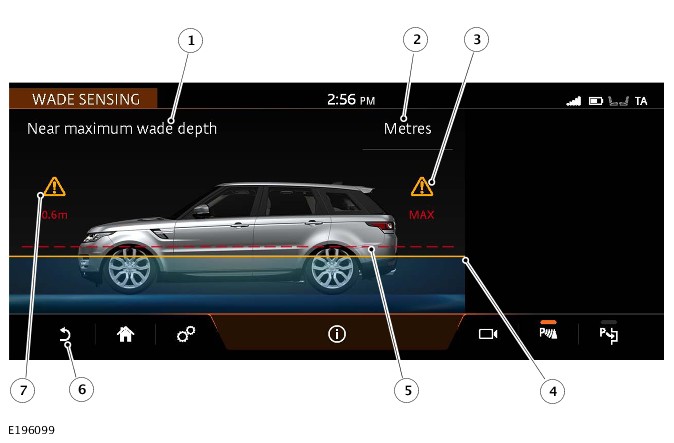
| ITEM | DESCRIPTION |
|---|---|
| 1 | Information display |
| 2 | Units |
| 3 | Maximum depth warning |
| 4 | Depth indication line |
| 5 | Maximum depth indication |
| 6 | Back 'soft key' |
| 7 | Depth indication numerical |
The TS provides the driver with the following information:
- Initial wading advice.
- Maximum vehicle wade depth.
- Advised to select 'Off Road' suspension height to support maximum wade ability.
- Ice wade warning, preventing potential damage to the vehicle.
- Near max wade depth.
- Max wade depth reached.
- Max wade depth exceeded.
- Road Gradient - level, nose down, nose up and laterally uneven.
The system warns the driver via the TS and IC and audible tones, when the maximum depth approaches. If the system limitations are exceeded, the TS view will grey out. Wade sensing is suspended if the vehicle's speed exceeds 16 km/h (10 mph). Wade sensing will automatically reactivate, if the vehicle's speed drops back down to 10 km/h (6 mph). If the vehicle's speed exceeds 30 km/h (19 mph) for 30 seconds, wade sensing will automatically switch off.
Wading performance is improved if the vehicle suspension is set to 'Off Road' height. Wade sensing will not operate if the exterior mirrors are in the fold position. Parking aid, park assist and intelligent stop/start systems are all disabled when wade sensing is operating.
CAMERA SYSTEM
Rear View Camera
A Low-Voltage Differential Signalling (LVDS) connection between the camera and the Touch Screen (TS) is used for the video image transmission.
The camera receives power at all times when the ignition is in power mode 6 or 7. When reverse gear is selected, the Rear View Camera (RVC) receives a signal on the High Speed (HS) Controller Ara Network (CAN) comfort bus. The RVC sends a message to entertainment system requesting for the image to be displayed and the TS. The image on the TS is a wide-angle color view from the rear of the vehicle.
When reverse gear is deselected, the camera image remains on the TS for 5 seconds after the transmission has been put into 'D', 'P', 'N', or 'S'. This is to prevent the TS switching between screens if the vehicle is being manoeuvered into a parking space. If the vehicle forward speed exceeds 16 km/h (10 mph) within the 5 second period, the camera image is removed from the TS.
If the TS display is switched off, the camera image will be automatically displayed when reverse gear is selected. When reverse gear is deselected and the 5 second period has expired, the TS will revert back to its switched off state.

| ITEM | DESCRIPTION |
|---|---|
| 1 | Rear View Camera Coverage Zone |
The Rear View Camera (RVC) provides additional information to the driver when reversing the vehicle. When reverse gear is selected the camera integrated into the tailgate handle, automatically displays a wide-angle color image of the view from the rear of the vehicle onto the Touch Screen (TS). Overlay graphics are displayed on the image.
The lines indicate:
- The inner lines are the tire trajectories.
- The outer lines indicate the egress area (Market dependant).
- The 'L' shape indicates the luggage compartment access.
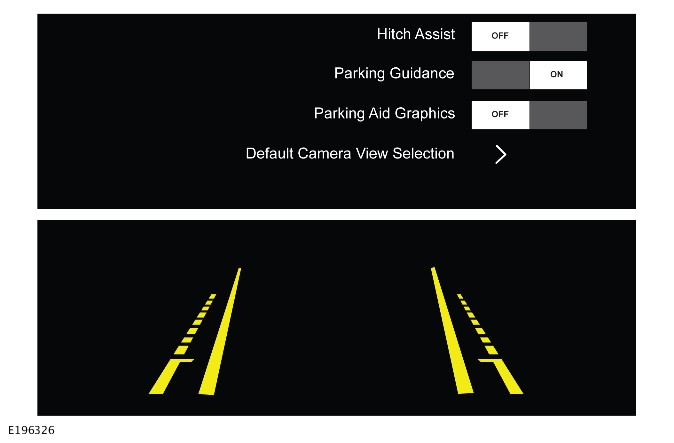
Hitch Assist
The Rear View Camera (RVC) provides additional information to the driver when hitching a trailer to the vehicle. When reverse gear is selected the camera integrated into the tailgate handle assembly, automatically displays a wide-angle color image of the view from the rear of the vehicle onto the Touch Screen (TS). Within the settings menu the driver can activate the hitch guidance feature. Hitch guidance provides a trajectory line indicating the path of the towbar in relation to the steering angle applied to the vehicle.
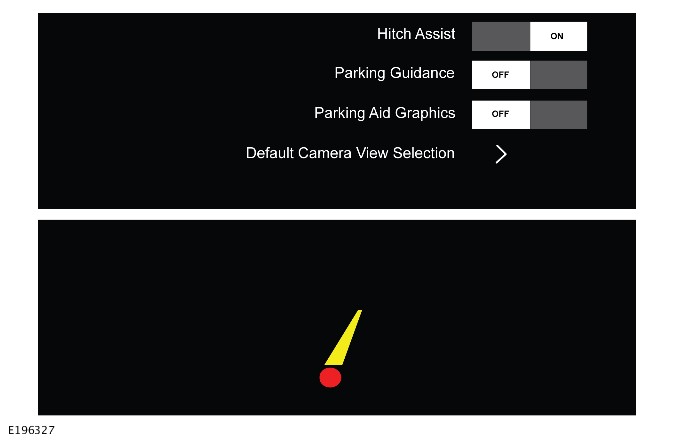
Proximity Camera System
The proximity camera system provides the driver with a visual-aid when manoeuvering the vehicle at low speeds. The system uses the Camera Control Module (CCM) to capture the camera data and display the resulting images on the Touch Screen (TS), providing the driver with a 360° view around the vehicle. The camera system is also supported by various driving-aid features where graphical information and warnings are superimposed onto the images displayed on the TS.
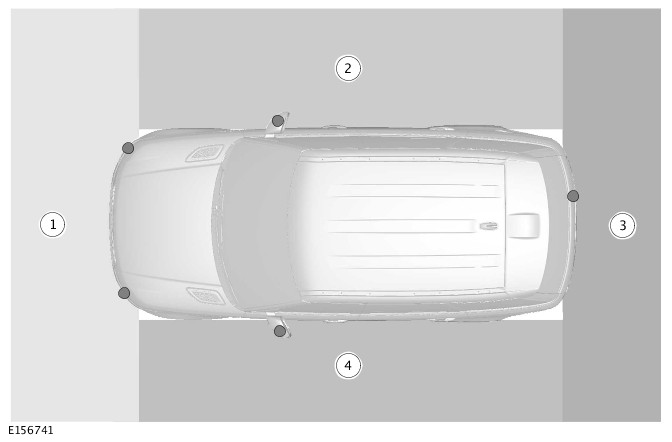
| ITEM | DESCRIPTION |
|---|---|
| 1 | Camera - front Coverage Zone |
| 2 | Door Mirror Camera - right Coverage Zone |
| 3 | Camera - rear Coverage Zone |
| 4 | Door Mirror Camera - left Coverage Zone |
Automatic operation
- Once the vehicle speed exceeds 18 km/h (11 mph) the images will automatically switch off.
- Once automatically switched off, the camera view will be disabled until one of the following occurs:
- Another ignition cycle occurs and the system is automatically functioned
- The camera system is manually selected on the Touch Screen (TS).
- The vehicle speed reduces under 18 km/h (11 mph).
- In Power Mode 6 or 7 and 'Reverse' selected, the camera system will display the view from the rear of the vehicle.
Selecting Views
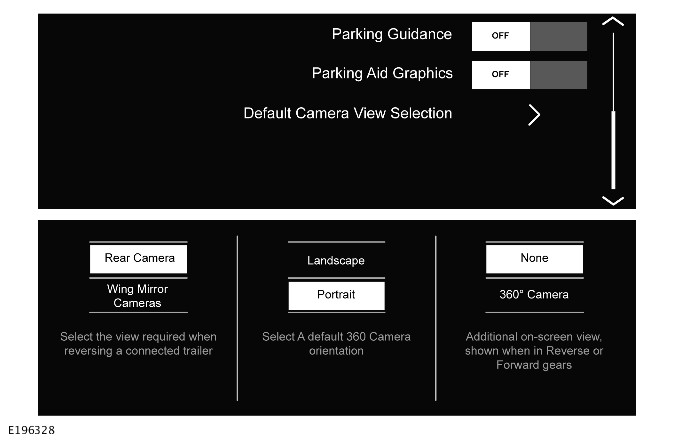
- Displayed on the Touch Screen (TS) are real-time images transmitted from each of the four cameras.
- An image can be zoomed and panned around using the magnifier and arrow icons.
Proximity Camera System
The proximity camera view images are overlaid with:
- Dashed lines representing the perimeter of the vehicle.
- Solid lines representing the predicted trajectory of the vehicle; calculated from the steering wheel angle sensor.
- Colored bars represent the amount of distance between the vehicle and the object being approached. Working in conjunction with the standard 'rear parking aid' this adds a visual representation to the existing audible warning.
The reversing-aid graphics can be disabled in the settings menu or by touching the Touch Screen (TS) whilst reverse gear is selected and the camera view is displayed.
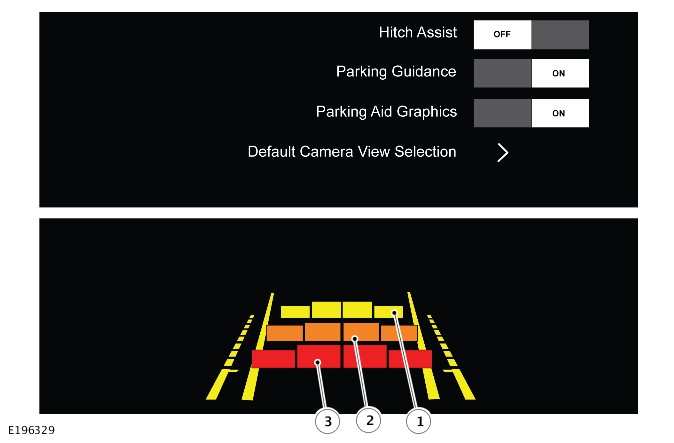
| ITEM | DESCRIPTION |
|---|---|
| 1 | Object Being Approached - 'Yellow Strip' with Steady Intermittent Warning Tone |
| 2 | Object Being Approached - 'Orange Strip' with Faster Intermittent Warning Tone |
| 3 | Object Being Approached - 'Red Strip' with Continuous Warning Tone |
The rear view image will not be displayed when any of the following apply:
- Drive is selected for longer than 5 seconds.
- Drive is selected and the vehicle speed is greater than 18 km/h (11 mph).
System Calibration
This is performed automatically.
If body repairs are performed that affect the camera system, a calibration procedure must be performed after the repairs are completed.
System Fault
In the event of camera fault, a Diagnostic Trouble Code (DTC) is logged in the Camera Control Module (CCM) and an icon is presented to the driver on the Touch Screen (TS) where the camera image would normally be viewed.
Hitch Assist
The rear view camera provides additional information to the driver when hitching a trailer to the vehicle. When reverse gear is selected the camera integrated into the tailgate handle assembly, automatically displays a wide-angle color image of the view from the rear of the vehicle onto the Touch Screen (TS).
Within the settings menu the driver can activate the hitch guidance and auto-towbar zoom feature. Hitch guidance provides a trajectory line indicating the path of the towbar in relation to the steering angle applied to the vehicle. 'Auto-towbar Zoom' initiates an automatic image zoom when the trailer is within 0.6 m (2 feet) of the towbar to allow more accurate alignment of vehicle to trailer.
Auto-towbar zoom feature is not available in the NAS market
Tow Assist - New Trailer
When the Body Control Module/Gateway Module (BCM/GWM) detects the trailer electrical plug has been connected, the trailer setup screen is displayed automatically on the Touch Screen (TS) with the question: 'Has a trailer been connected?'
Selecting 'Yes' will bring up the first of a number of trailer setup screens. On first use the setup screens take the user through a series of configuration options for the connected trailer. To configure a new trailer select 'Add New' and then 'OK'.
Trailer Setup - Step 1 of 6

- Choose from the list of generic trailer descriptive icons for the trailer attached, then select 'Next'.
Trailer Setup - Step 2 of 6
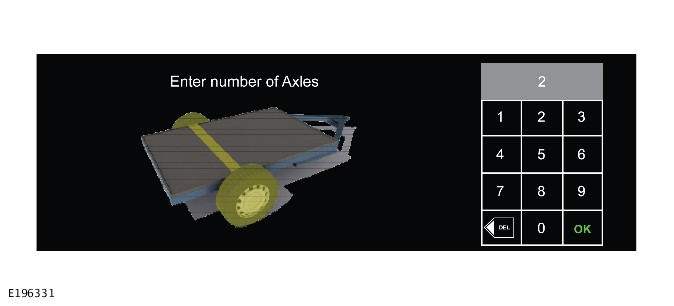
- Select the number of axles from the , then select 'Next'.
Trailer Setup - Step 3 of 6
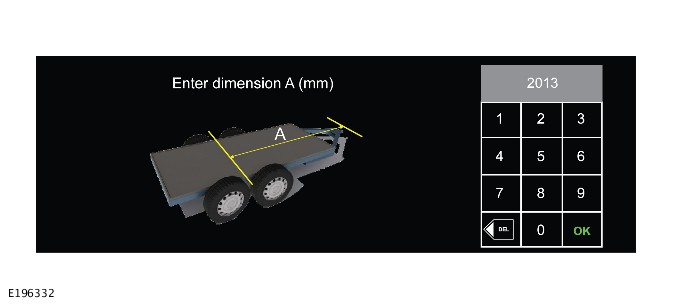
- Enter the dimensions of the trailer , then select 'Next'.
Trailer Setup - Step 4 of 6
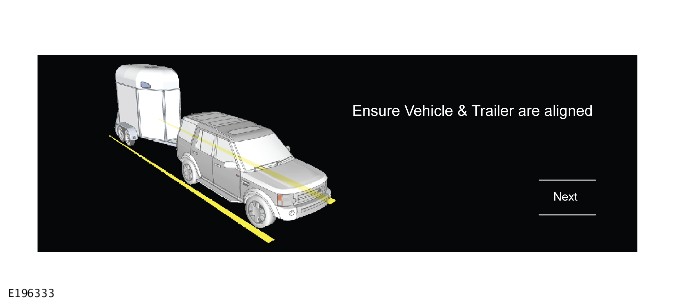
- Position the trailer straight behind the vehicle, then select 'Next'.
Trailer Setup - Step 5 of 6

- Using the distance adjustment buttons, set the orange overlay graphics at the width of the trailer wheels.

- attach the target sticker (shown below) in the orange zone. When the camera detects the target a green zone will appear,, then select 'Next'.
Trailer Setup - Step 6 of 6

- In order to learn the central position of the trailer, the vehicle must be driven forwards at less than 24 km/h (15 mph) with the steering wheel in the straight-ahead position.
- When the tracking feature is learning the central position, a progress bar will also appear to show the process is progressing.
Finally, highlight the trailer that has been memorized, and select 'OK'.
The Tow Assist feature is now ready to use.
Tow Assist - Previously Saved Trailer
When the Body Control Module/Gateway Module (BCM/GWM) detects the trailer electrical plug has been connected, the trailer setup screen is displayed automatically on the Touch Screen (TS) with the question: 'Has a trailer been connected?'
Selecting 'Yes' from the previous screen brings a list of pre-set, or previously saved, trailers. Highlight the required trailer and select 'OK'.
PARKING AID
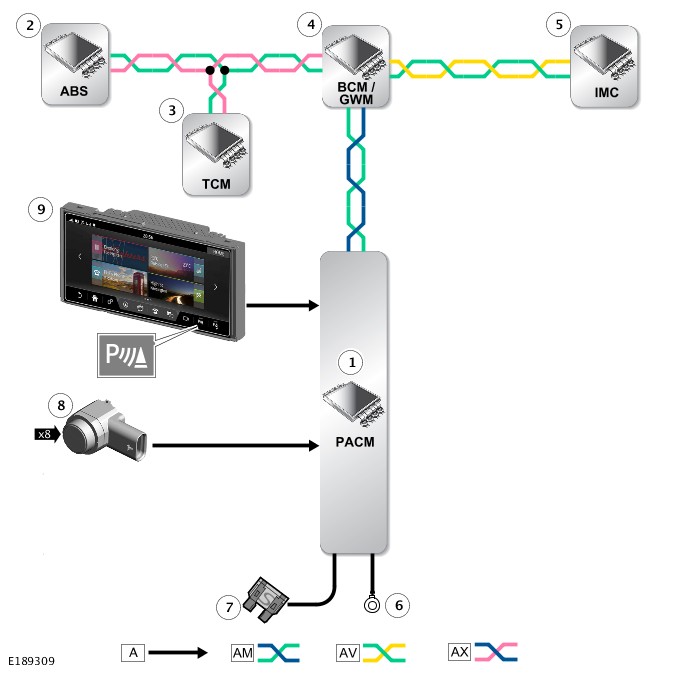
A = HARDWIRED: AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS: AV = HS CAN COMFORT BUS: AX = FLEXRAY
| ITEM | DESCRIPTION |
|---|---|
| 1 | Parking Assist Control Module (PACM) |
| 2 | Anti-Lock Brake System Control Module (ABS) |
| 3 | Transmission Control Module (TCM) |
| 4 | Body Control Module/Gateway Module (BCM/GWM) |
| 5 | Infotainment Master Controller (IMC) |
| 6 | Ground |
| 7 | Supply |
| 8 | Park Aid Sensors (8 off) |
| 9 | Park Assist soft key |
PARK ASSIST
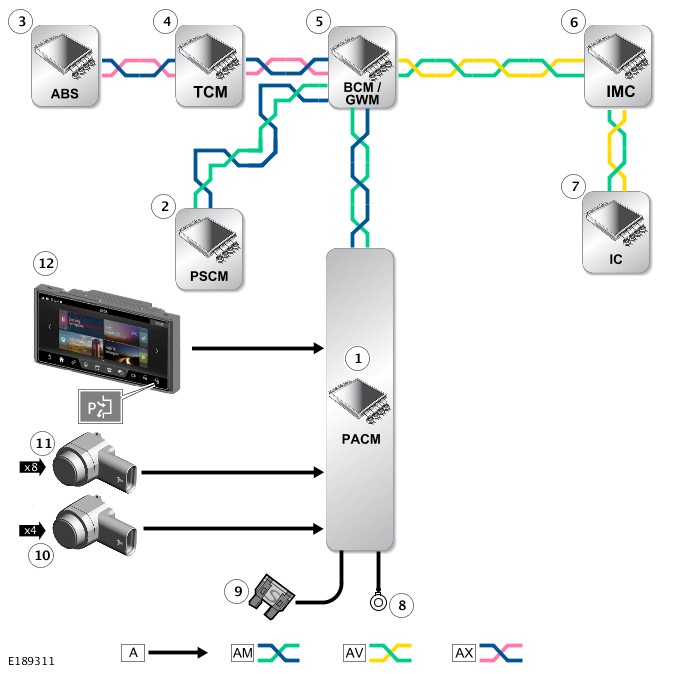
A = HARDWIRED: AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS: AV = HS CAN COMFORT BUS: AX = FLEXRAY
| ITEM | DESCRIPTION |
|---|---|
| 1 | Parking Assist Control Module (PACM) |
| 2 | Power Steering Control Module (PSCM) |
| 3 | Anti-Lock Brake System Control Module (ABS) |
| 4 | Transmission Control Module (TCM) |
| 5 | Body Control Module/Gateway Module (BCM/GWM) |
| 6 | Infotainment Master Controller (IMC) |
| 7 | Instrument Cluster (IC) |
| 8 | Ground |
| 9 | Supply |
| 10 | Park Assist Sensor (4 off) |
| 11 | Park Aid Sensors (8 off) |
| 12 | Park Assist soft key |
REAR VIEW CAMERA SYSTEM
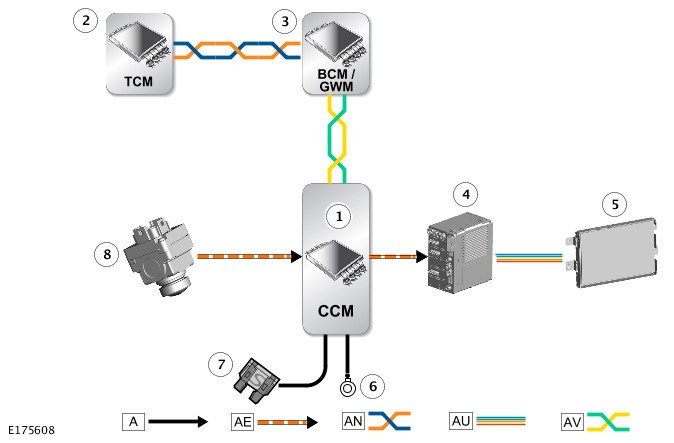
A = HARDWIRED: AE = LOW-VOLTAGE DIFFERENTIAL SIGNALLING (LVDS): AN = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) POWERTRAIN BUS: AU = AUTOMOTIVE PIXEL LINK 2 (APIX2): AV = HS CAN COMFORT BUS.
| ITEM | DESCRIPTION |
|---|---|
| 1 | Camera Control Module (CCM) |
| 2 | Transmission Control Module (TCM) |
| 3 | Body Control Module/Gateway Module (BCM/GWM) assembly |
| 4 | Infotainment Master Controller (IMC) |
| 5 | Touch Screen (TS) |
| 6 | Ground |
| 7 | Power supply |
| 8 | Rear View Camera (RVC) |
PROXIMITY CAMERA SYSTEM
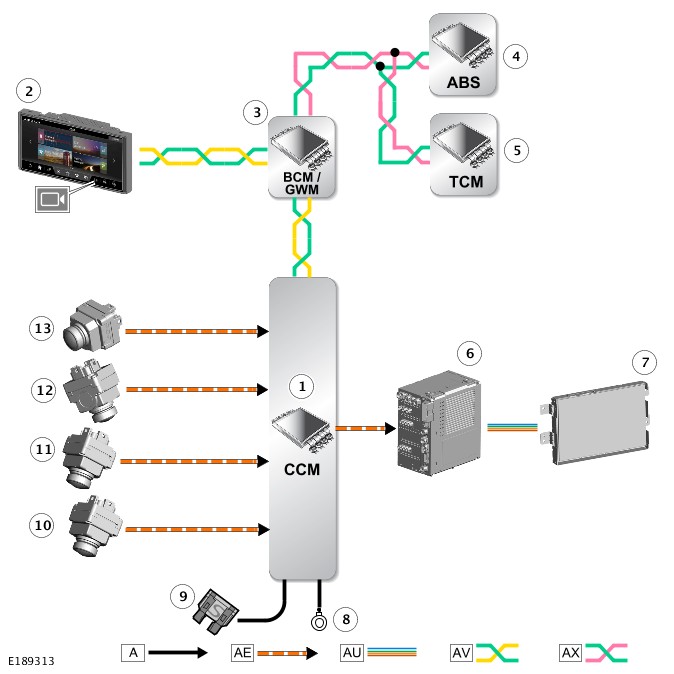
A = HARDWIRED: AE = LOW-VOLTAGE DIFFERENTIAL SIGNALLING (LVDS): AU = AUTOMOTIVE PIXEL LINK 2 (APIX2): AV = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) COMFORT BUS: AX = FLEXRAY
| ITEM | DESCRIPTION |
|---|---|
| 1 | Camera Control Module (CCM) |
| 2 | Proximity Camera soft key |
| 3 | Body Control Module/Gateway Module (BCM/GWM) |
| 4 | Anti-Lock Brake System Control Module (ABS) |
| 5 | Transmission Control Module (TCM) |
| 6 | Infotainment Master Controller (IMC) |
| 7 | Touch Screen (TS) |
| 8 | Ground |
| 9 | Supply |
| 10 | Proximity camera - Front |
| 11 | Proximity camera door mirror - Left |
| 12 | Proximity camera door mirror - Right |
| 13 | Proximity camera - Rear |
WADE SENSING SYSTEM

A = HARDWIRED: AM = HIGH SPEED (HS) CONTROLLER AREA NETWORK (CAN) CHASSIS BUS: AV = HS CAN COMFORT BUS
| ITEM | DESCRIPTION |
|---|---|
| 1 | General Proximity Sensor Module (GPSM) |
| 2 | Body Control Module/Gateway Module (BCM/GWM) |
| 3 | Touch Screen (TS) |
| 4 | Instrument Cluster (IC) |
| 5 | Ground |
| 6 | Supply |
| 7 | Door mirror wade sensor - Right |
| 8 | Door mirror wade sensor - Left |
Diagnosis and Testing
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID (G1549915)
For a detailed description of the parking assist system, characteristics and limitations refer to the relevant description and operation section in the workshop manual. REFER to:Parking Aid (413-13 Parking Aid, Description and Operation).
As part of the strategy of the system if any DTCs are detected, a long high-pitched tone approx 3 seconds will sound and the parking assist switch (where installed) indicator LED will flash 6 times at ignition on
- If a fault is present when the parking assist system is activated then the parking assist switch (where installed) status LED will flash 6 times indicating an issue with front or rear parking assist sensors, wiring switch, parking assist control module or hard wired sounders
- The rear parking assist sounder/rear audio system will emit an error tone for approx 3 seconds at ignition on if a fault is detected with the front or rear sensors, the switch, or if there is a controller area network (CAN) bus error
- (Only applicable to vehicles installed with front parking assist and a hard wired rear parking assist sounder). If there is a fault with the rear parking assist sounder the error tone will come from the front parking assist sounder unit (integral with the instrument cluster)
Audible and Visual Warnings when Parking Assist System is in Error State
| REAR PARKING ASSIST SYSTEM INSTALLED AND NO PARKING ASSIST SYSTEM SWITCH INSTALLED | REAR PARKING ASSIST SYSTEM INSTALLED AND PARKING ASSIST SYSTEM SWITCH INSTALLED | FRONT AND REAR PARKING ASSIST SYSTEM INSTALLED WITH PARKING ASSIST SYSTEM SWITCH INSTALLED |
|---|---|---|
| A long high-pitched error tone will sound at Ignition On for approx 3 seconds |
|
|
-
If the control module or a component is at fault and the vehicle remains under manufacturer warranty, refer to the warranty policy and procedures manual, or determine if any prior approval program is in operation, prior to the installation of a new module/component.
-
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault, and may also cause additional faults in the vehicle being tested and/or the donor vehicle
-
Do not apply any grease based products to any parking assist system connector or pins
Check JLR claims submission system for open campaigns. Refer to the corresponding bulletins and SSMs which may be valid for the specific customer complaint and complete the recommendations as required.
- Verify the customer concern
- Visually inspect for obvious signs of mechanical or electrical damage
- Make sure that the parking assist sensor face is clear of contamination that could affect the performance of the sensor
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step
- If the cause is not visually evident, check for diagnostic trouble codes (DTCs) and refer to the DTC index
Symptom Chart
Do not apply any grease based products to any parking assist system connector or pins
-
Please note if this diagnosis is being completed on a vehicle without a hard wired parking assist speaker, make sure the in car infotainment system is fully functional and configured correctly
-
Parking assist sensors that are painted incorrectly and not to the manufacturer standards, will not be considered in any warranty claim
| SYMPTOM | POSSIBLE CAUSES | ACTION |
|---|---|---|
|
NOTE:
Permanent/Intermittent fault |
|
|
|
NOTE:
Permanent/Intermittent fault |
|
|
| Parking assist sensors are being returned with no faults found or signs of water ingress/corrosion | Possible issue with sensor connectors not latched correctly |
|
Where the parking assist system has developed a fault caused by a faulty harness and/or connector(s), JLR engineering have requested that retailers supply feedback as to the nature and location of the fault. In any case where the parking assist system has developed a fault that is attributable to harness and/or connector faults, please raise a TA and include the following level of detail on the fault report:
Please note the nature of the fault according to the following criteria:
- Non-connection (open circuit)
- Poor/intermittent connection
- Damage to harness and/or connector
- Chafing of harness
- Trapped or incorrectly routed harness
- Backed out pin
- Damaged pin
Please note the location of the fault according to the following criteria:
- Front or rear of the vehicle
- Left side outer sensor
- Left side inner sensor
- Right side outer sensor
- Right side inner sensor
- Bumper harness
- Connection between vehicle harness and bumper harness
Where there is clear evidence that a parking assist sensor has sustained damage due to stone chipping or other impact damage that has resulted in corrosion and subsequent malfunction, retailers should note that this form of damage is regarded as wear and tear and, therefore rectification of this damage is NOT claimable under any of the vehicle warranties. Retailers are referred to Section B1.45 (Guide To Warranty Terms And Conditions - General Items - Stone Chips/Paint Damage) in the Global Warranty Compliance And Procedures Manual, which can be found in the Warranty Manual section of the Retailer Standards and Training Documents on TOPIx. Further information can also be found in Section A1.7 (Warranty Terms And Conditions - Summary of Vehicle Warranty - What is Not Covered By The Vehicle Warranty).
The image below shows clearly that an impact from a stone chipping or another object has pitted the surface of the parking assist sensor sensors. The pits/indentations should also be detectable by feeling the surface of the sensor and checking the surface profile for indentations. This kind of damage would NOT be covered by vehicle warranty.
If left untreated, the damage to the face of the sensors caused by stone chips can cause corrosion to the painted surface of the parking assist sensor. The image below shows four examples of this form of corrosion. Note how, if the surface of the sensor appears to look like a crater, then this indicates that the corrosion has occurred as a result of earlier damage from stone chipping. This kind of damage would NOT be covered by vehicle warranty.
| B4: PARKING ASSIST SYSTEM GIVES WARNING SIGNAL WITHOUT OBSTACLE | |
|---|---|
| TEST CONDITIONS | DETAILS/RESULTS/ACTIONS |
|
1
Limitations or characteristics of the parking assist system such as vehicle on a gradient, exhaust gas vapor, signal reflection
|
|
|
|
Parking assist system functioning correctly?
Yes
No further action required
No
For a detailed description of the parking assist system, refer to the relevant description and operation section in the workshop manual. REFER to:Parking Aid (413-13 Parking Aid, Description and Operation).
|
For a list of diagnostic trouble codes that could be set on this vehicle, please refer to Section 100-00. REFER to:Diagnostic Trouble Code Index - DTC: Parking Assist Control Module (PACM) (100-00 General Information, Description and Operation).
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
REAR VIEW CAMERA (G1875476)
For a detailed description of the rear view camera system, refer to the relevant Description and Operation section of the workshop manual.REFER to:Parking Aid (413-13 Parking Aid, Description and Operation).
-
A risk assessment must be performed before any work is undertaken.
-
All hybrid electric vehicle work must be performed by a suitably qualified person.
-
Appropriate Personal Protection Equipment must be worn when working on or near a hybrid electric vehicle high voltage system.
-
The hybrid electric vehicle battery pack casing must not be opened due to the risk of exposure to hazardous voltage, which may cause serious injury or death.
-
The electric power inverter converter casing must not be disassembled due to the risk of exposure to hazardous voltage, which may cause serious injury or death.
-
If the hybrid electric vehicle battery pack is damaged or overcharged, there is a risk of exposure to hazardous voltage and/or highly corrosive electrolyte mist. If liquid or vapor is observed leaking from the hybrid electric vehicle battery pack, take the following action:
- Evacuate the area
- Notify manager
- Do not breathe smoke/vapor
- Contain spillage using spill kit
- Wash any spillage off body and clothing (remove contaminated clothing)
-
If the hybrid electric vehicle warning indicator is illuminated, the Battery Energy Control Module (BECM) cannot isolate the high voltage cables. Live working will be necessary to rectify the fault.
-
The motor generator can generate a voltage if the wheels are rotated, even if the hybrid electric vehicle system has been made safe.
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault, and may also cause additional faults in the vehicle being tested and/or the donor vehicle.
-
If a control module or a component is at fault and the vehicle remains under manufacturer warranty, refer to the Warranty Policy and Procedures manual, or determine if any prior approval program is in operation, prior to the installation of a new module/component.
-
When performing voltage or resistance tests, always use a digital multimeter that has the resolution ability to view 3 decimal places. For example, on the 2 volts range can measure 1mV or 2 K Ohm range can measure 1 Ohm. When testing resistance always take the resistance of the digital multimeter leads into account.
-
Check and rectify basic faults before beginning diagnostic routines involving pinpoint tests.
- Verify the customer concern
- Visually inspect for obvious signs of damage and system integrity
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step
- If the cause is not visually evident, verify the symptom and refer to the Symptom Chart, alternatively check for Diagnostic Trouble Code(s) (DTC)s and refer to the DTC Index
- Check the JLR claims submission system for open campaigns. Refer to the corresponding bulletins and SSMs which may be valid for the specific customer complaint and complete the recommendations as required.
| SYMPTOM | POSSIBLE CAUSE | ACTION |
|---|---|---|
| Rear view camera image slow to react |
|
NOTE:
After selecting reverse, it may take up to 2 seconds for the image to be displayed
|
| Blank screen |
|
|
| Camera system unavailable |
|
|
| No tracking lines |
|
|
| Frozen tracking lines |
|
|
|
PINPOINT TEST B : CAMERA SYSTEM UNAVAILABLE
|
|
|---|---|
| B1: CAMERA SYSTEM UNAVAILABLE TEST 1 | |
| TEST CONDITIONS | DETAILS/RESULTS/ACTIONS |
|
NOTE:
A camera system unavailable message/icon will be displayed on the touchscreen |
|
|
1
Select reverse gear and observe the touchscreen
|
|
|
|
Is a camera system unavailable message/icon displayed on the touchscreen?
Yes
Check the integrity of the rear view camera coaxial cable connectors (at rear view camera, the touchscreen and in-line connectors), and retest
No
GO to Pinpoint TestA.
|
|
PINPOINT TEST D : FROZEN TRACKING LINES TESTS
|
|
|---|---|
| D1: FROZEN TRACKING LINES TEST 1 | |
| TEST CONDITIONS | DETAILS/RESULTS/ACTIONS |
|
1
Start the engine
|
|
|
2
Wait at least 30 seconds
|
|
|
3
Select reverse gear
|
|
|
4
Turn the steering wheel and observe the touchscreen
|
|
|
|
Do the tracking lines react to steering input?
Yes
No fault present
No
Using the Jaguar Land Rover approved diagnostic equipment, perform a Flexray/CAN network integrity testGO to Pinpoint TestC.
|
Where there is clear evidence that a camera lens has sustained damage due to stone chipping, abrasions or other impact damage that has resulted in poor or blurred/foggy image and similar symptoms, retailers should note that this form of damage is regarded as wear and tear and, therefore rectification of this damage is NOT claimable under any of the vehicle warranties. Retailers are referred to Section B1.45 (Guide To Warranty Terms And Conditions - General Items - Stone Chips/Paint Damage) in the Global Warranty Compliance And Procedures Manual, which can be found in the Warranty Manual section of the Retailer Standards and Training Documents on TOPIx. Further information can also be found in Section A1.7 (Warranty Terms And Conditions - Summary of Vehicle Warranty - What is Not Covered By The Vehicle Warranty).
The image below shows clearly that an impact from a stone chipping or another object has pitted the surface of the camera lens. The pits/indentations should also be detectable by feeling the surface of the lens and checking the surface profile for indentations. This kind of damage would NOT be covered by vehicle warranty.
The image below shows the rear view camera image you would expect to see from a damaged camera lens. This kind of damage would NOT be covered by vehicle warranty.
The image below shows the rear view camera image you would expect to see from an undamaged camera lens.
For a list of DTCs that could be set on this vehicle, please refer to Section 100-00.REFER to:Diagnostic Trouble Code Index - DTC: Camera Control Module (CCM) (100-00 General Information, Description and Operation) / Diagnostic Trouble Code Index - DTC: Rear View Camera (100-00 General Information, Description and Operation).
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
PROXIMITY CAMERA SYSTEM (G2283144)
For a detailed description of the rear view camera system, refer to the relevant Description and Operation section of the workshop manual.REFER to:Parking Aid (413-13 Parking Aid, Description and Operation).
Diagnosis by substitution from a donor vehicle is NOT acceptable. Substitution of control modules does not guarantee confirmation of a fault, and may also cause additional faults in the vehicle being tested and/or the donor vehicle.
-
If a control module or a component is at fault and the vehicle remains under manufacturer warranty, refer to the Warranty Policy and Procedures manual, or determine if any prior approval program is in operation, prior to the installation of a new module/component.
-
When performing voltage or resistance tests, always use a digital multimeter that has the resolution ability to view 3 decimal places. For example, on the 2 volts range can measure 1mV or 2 K Ohm range can measure 1 Ohm. When testing resistance always take the resistance of the digital multimeter leads into account.
-
Check and rectify basic faults before beginning diagnostic routines involving pinpoint tests.
- Verify the customer concern
- Visually inspect for obvious signs of damage and system integrity
Visual Inspection
| MECHANICAL | ELECTRICAL |
|---|---|
|
|
- If an obvious cause for an observed or reported concern is found, correct the cause (if possible) before proceeding to the next step
- If the cause is not visually evident, verify the symptom and refer to the Symptom Chart, alternatively check for Diagnostic Trouble Code(s) (DTC)s and refer to the DTC Index
- Check the JLR claims submission system for open campaigns. Refer to the corresponding bulletins and SSMs which may be valid for the specific customer complaint and complete the recommendations as required.
| SYMPTOM | POSSIBLE CAUSE | ACTION |
|---|---|---|
| Camera image slow to react |
|
NOTE:
After selecting reverse, it may take up to 2 seconds for the image to be displayed
|
| Blank screen |
|
|
| Camera system unavailable |
|
|
| No tracking lines |
|
|
| Frozen tracking lines |
|
|
|
PINPOINT TEST B : CAMERA SYSTEM UNAVAILABLE
|
|
|---|---|
| B1: CAMERA SYSTEM UNAVAILABLE TEST 1 | |
| TEST CONDITIONS | DETAILS/RESULTS/ACTIONS |
|
NOTE:
A camera system unavailable message/icon will be displayed on the Touchscreen |
|
|
1
Select reverse gear and observe the Touchscreen
|
|
|
|
Is a camera system unavailable message/icon displayed on the Touchscreen?
Yes
Check the integrity of camera control module (IPMB) and individual camera coaxial cable connectors and retest
No
GO to Pinpoint TestA.
|
|
PINPOINT TEST D : FROZEN TRACKING LINES TESTS
|
|
|---|---|
| D1: FROZEN TRACKING LINES TEST 1 | |
| TEST CONDITIONS | DETAILS/RESULTS/ACTIONS |
|
1
Start the engine
|
|
|
2
Wait at least 30 seconds
|
|
|
3
Select reverse gear
|
|
|
4
Turn the steering wheel and observe the Touchscreen
|
|
|
|
Do the tracking lines react to steering input?
Yes
No fault present
No
Using the Jaguar Land Rover approved diagnostic equipment, perform a Flexray/CAN network integrity testGO to Pinpoint TestC.
|
Where there is clear evidence that a camera lens has sustained damage due to stone chipping, abrasions or other impact damage that has resulted in poor or blurred/foggy image and similar symptoms, retailers should note that this form of damage is regarded as wear and tear and, therefore rectification of this damage is NOT claimable under any of the vehicle warranties. Retailers are referred to Section B1.45 (Guide To Warranty Terms And Conditions - General Items - Stone Chips/Paint Damage) in the Global Warranty Compliance And Procedures Manual, which can be found in the Warranty Manual section of the Retailer Standards and Training Documents on TOPIx. Further information can also be found in Section A1.7 (Warranty Terms And Conditions - Summary of Vehicle Warranty - What is Not Covered By The Vehicle Warranty).
The image below shows clearly that an impact from a stone chipping or another object has pitted the surface of the camera lens. The pits/indentations should also be detectable by feeling the surface of the lens and checking the surface profile for indentations. This kind of damage would NOT be covered by vehicle warranty.
The images below show the front and rear view camera images you would expect to see from a damaged camera lens. This kind of damage would NOT be covered by vehicle warranty.

The images below show the front and rear view camera images you would expect to see from an undamaged camera lens.
For a list of DTCs that could be set on this vehicle, please refer to Section 100-00.REFER to:Diagnostic Trouble Code Index - DTC: Camera Control Module (CCM) (100-00 General Information, Description and Operation).
Removal and Installation
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
FRONT INNER PARKING AID SENSOR (G1549863)
- 86.54.21
- SENSOR - PARKING AID - FRONT - INNER - RENEW
- ALL DERIVATIVES
- 0.80
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
LH illustration shown, RH is similar.
-
The ignition must be switched off.
-
Check the sensor before removing to note if the sensor(s) are painted or unpainted.
-
Raise and support the vehicle.WARNING:
Make sure to support the vehicle with axle stands.
-
Refer to:Front Bumper Cover (501-19 Bumpers, Removal and Installation).
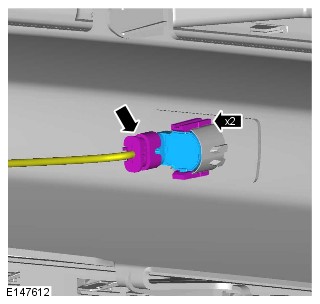
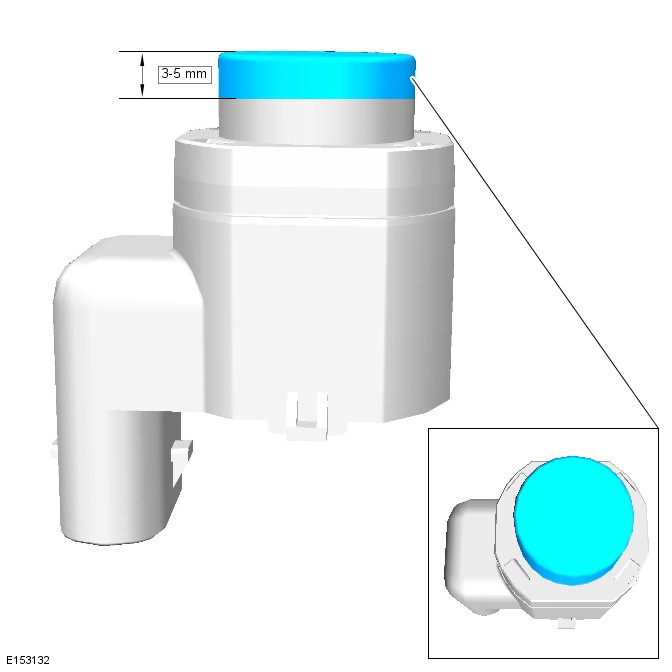
- To install, reverse the removal procedure.
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
FRONT OUTER PARKING AID SENSOR (G1549865)
- 86.54.22
- SENSOR - PARKING AID - FRONT - OUTER - RENEW
- ALL DERIVATIVES
- 0.80
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
LH illustration shown, RH is similar.
-
The ignition must be switched off.
-
Check the sensor before removing to note if the sensor(s) are painted or unpainted.
-
Raise and support the vehicle.WARNING:
Make sure to support the vehicle with axle stands.
-
Refer to:Front Bumper Cover (501-19 Bumpers, Removal and Installation).
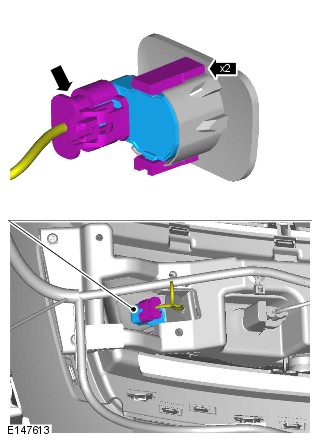
- To install, reverse the removal procedure.
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
FRONT PARKING AID CAMERA (G1549866)
- 86.54.90
- FRONT PROXIMITY CAMERA - EACH - RENEW
- ALL DERIVATIVES
- 0.80
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
-
Raise and support the vehicle.WARNING:
Make sure to support the vehicle with axle stands.
-
Refer to:Front Bumper Cover (501-19 Bumpers, Removal and Installation).
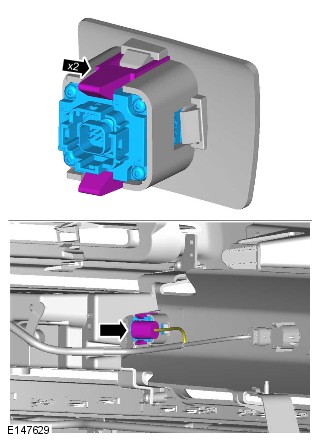
- To install, reverse the removal procedure.
-
- Following the replacement of a camera on these vehicles the calibration process is:
- Drive the vehicle for 5 to 10 minutes as much as possible in a straight line, up to 30kph / 19mph, during this time the camera will self-calibrate (do not have the camera functions turned on) to be carried out in normal daylight conditions.
- After completing the drive cycle camera operation can be checked by:
- Surround View Camera: To check calibration parked next to a kerb/line select camera view make sure a straight line is visible on screen in the 360 plan view
- Standalone Rear Camera To check calibration reverse straight into a marked parking slot and see trajectory overlays are parallel to the markings on the ground
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
PARKING AID MODULE (G1549867)
- 86.54.10
- CONTROL UNIT (ECU) - PARKING AID - RENEW
- ALL DERIVATIVES
- 0.30
- USED WITHINS
-
If a new parking aid module is to be installed, configure the parking aid module using the Land Rover approved diagnostic system.
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
-
Refer to:Left Loadspace Trim Panel (501-05 Interior Trim and Ornamentation, Removal and Installation).
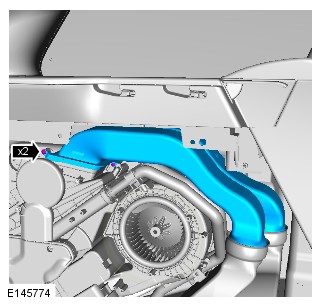
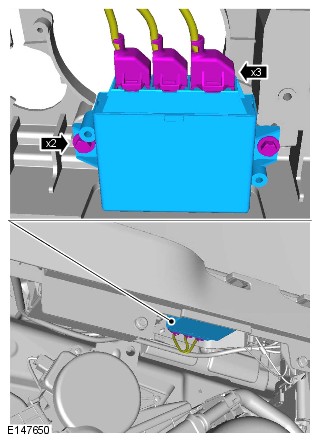
- To install, reverse the removal procedure.
- Using the diagnostic tool, configure the parking aid module.
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
PARKING AID CAMERA MODULE (G1948090)
- 86.54.96
- MODULE - PARKING AID CAMERA - RENEW
- ALL DERIVATIVES
- 0.60
- USED WITHINS
GENERAL EQUIPMENT
| EQUIPMENT NAME |
|---|
| Land Rover diagnostic equipment |
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
- Remove the right hand side front seat.
Refer to:Front Row Seat - Vehicles With: Power Seats (501-10 Seating, Removal and Installation).Refer to:Front Row Seat - Vehicles With: Power Seats (501-10 Seating, Removal and Installation).
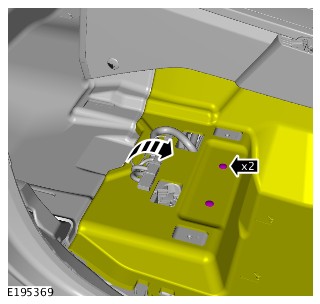
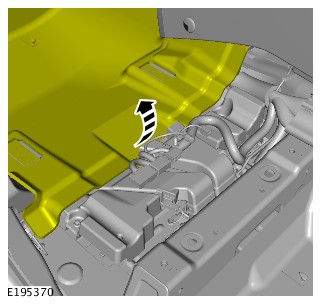
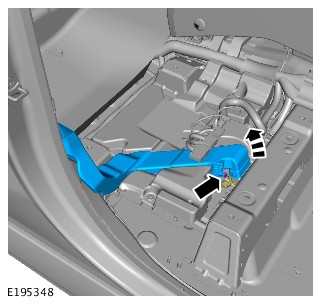
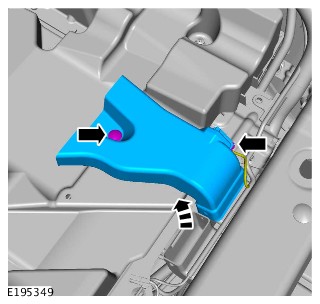
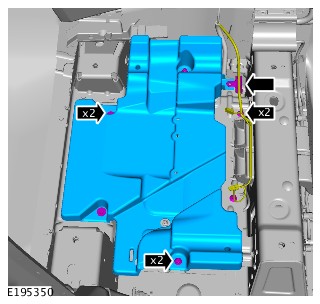
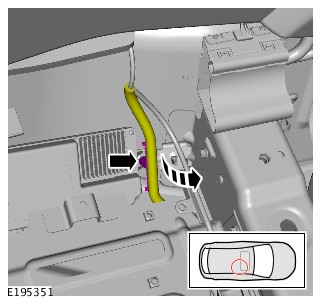
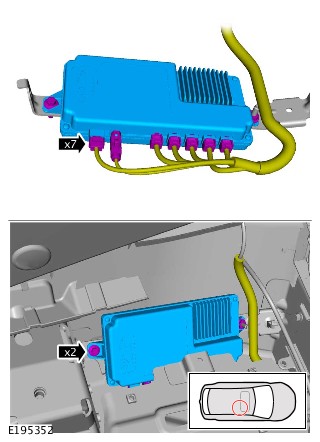
- To install, reverse the removal procedure.
- If a new component has been installed, configure using Land Rover approved diagnostic equipment.
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
REAR PARKING AID CAMERA (G1888740)
- 86.54.40
- REAR PROXIMITY CAMERA - RENEW
- ALL DERIVATIVES
- 0.20
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
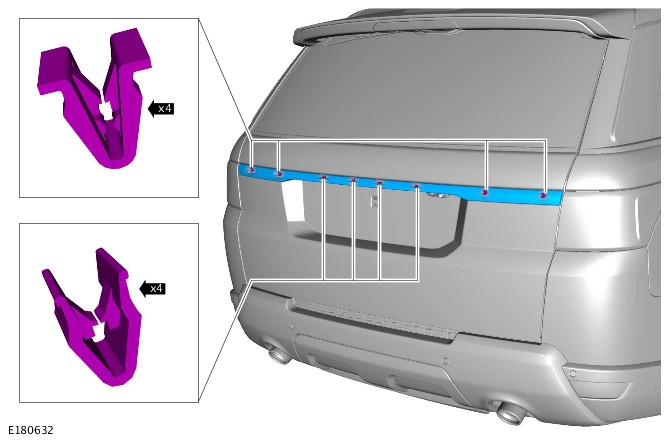
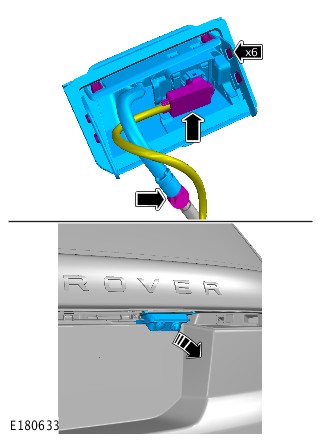
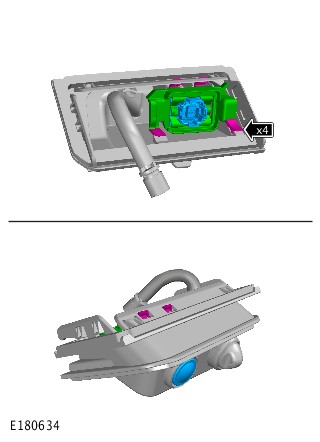
- To install, reverse the removal procedure.
- Vehicles fitted with InControl Touch rear camera only do not require calibration when fitting a new camera.
-
- Following the replacement of a camera on these vehicles the calibration process is:
- Drive the vehicle for 5 to 10 minutes as much as possible in a straight line, up to 30kph / 19mph, during this time the camera will self-calibrate (do not have the camera functions turned on) to be carried out in normal daylight conditions.
- After completing the drive cycle camera operation can be checked by:
- Surround View Camera: To check calibration parked next to a kerb/line select camera view make sure a straight line is visible on screen in the 360 plan view
- Standalone Rear Camera To check calibration reverse straight into a marked parking slot and see trajectory overlays are parallel to the markings on the ground
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
REAR PARKING AID SENSOR (G1549869)
- 86.54.14
- REAR PARKING AID SENSOR - RENEW
- ALL DERIVATIVES
- 1.10
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
Check the sensor before removing to note if the sensor(s) are painted or unpainted.
-
Raise and support the vehicle.WARNING:
Make sure to support the vehicle with axle stands.
-
Refer to:Rear Bumper Cover (501-19 Bumpers, Removal and Installation).
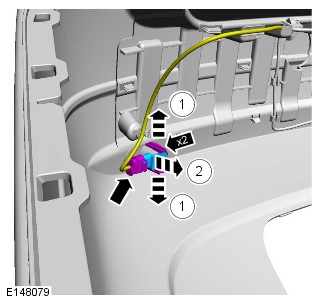
- To install reverse the removal procedure.
2017.0 RANGE ROVER SPORT (LW), 413-13
PARKING AID
SIDE PARKING AID CAMERA (G1676334)
- 86.54.94
- SIDE MIRROR PROXIMITY CAMERA - EACH - RENEW
- ALL DERIVATIVES
- 0.30
- USED WITHINS
-
Removal steps in this procedure may contain installation details.
-
The ignition must be switched off.
-
LH illustration shown, RH is similar.
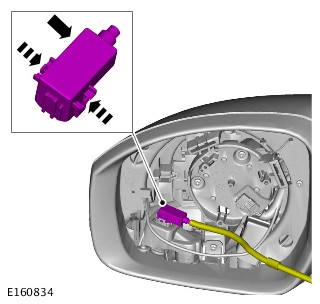
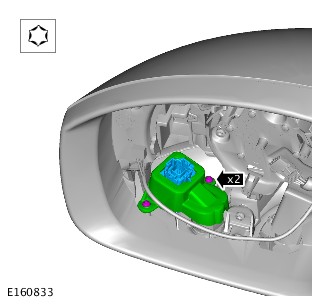
- To install, reverse the removal procedure.
-
- Following the replacement of a camera on these vehicles the calibration process is:
- Drive the vehicle for 5 to 10 minutes as much as possible in a straight line, up to 30kph / 19mph, during this time the camera will self-calibrate (do not have the camera functions turned on) to be carried out in normal daylight conditions.
- After completing the drive cycle camera operation can be checked by:
- Surround View Camera: To check calibration parked next to a kerb/line select camera view make sure a straight line is visible on screen in the 360 plan view
- Standalone Rear Camera To check calibration reverse straight into a marked parking slot and see trajectory overlays are parallel to the markings on the ground



























